- Вы не вошли.
Объявления
- Начало
- » Электроника основной форум
- » Самолёт и 3D гироскоп
![[RSS Feed]](/static/forum/img/feed-icon-small.png "[RSS Feed]")
#1 Фев. 24, 2013 20:01:02
- CAMELION
-

-

- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5859
- Репутация:
 12
12 
- Профиль Отправить e-mail
Самолёт и 3D гироскоп
Создал новую тему, что бы облегчить пилотам самолётов полеты в ветер и выполнение 3D фигур
http://www.mycoolrc.com/gyro/indexnew.html [mycoolrc.com] на русском
http://www.mycoolrc.com/gyro/indexnew.html [mycoolrc.com] на вражеском
Счастлив тот кто не врёт, кто придуманным живёт
http://www.mycoolrc.com/gyro/indexnew.html [mycoolrc.com] на русском
http://www.mycoolrc.com/gyro/indexnew.html [mycoolrc.com] на вражеском
Счастлив тот кто не врёт, кто придуманным живёт
Офлайн

#3 Фев. 24, 2013 20:39:22
- CAMELION
-
-
- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5859
- Репутация:
12
- Профиль Отправить e-mail
Самолёт и 3D гироскоп
modelistМогу посоветовать переводчика! Но дорого берёт собака!
Юра!русского нет.

Счастлив тот кто не врёт, кто придуманным живёт
Офлайн
#4 Май 28, 2014 01:07:20
- CAMELION
-
-
- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5859
- Репутация:
12
- Профиль Отправить e-mail
Самолёт и 3D гироскоп
Новые возможности старого знакомого. Прошиваем OrangeRX 3 axis Flight Stabilizator v2.

Многим знакома недорогая система стабилизации полета от OrangeRX. Предполагалось, что она будет подспорьем начинающим пилотам, позволяя им меньше отвлекаться на борьбу с ветром, а также даст возможность выполнять более ровные и красивые полеты. В каком-то смысле это удалось - стабилизатор действительно неплохо парирует порывы ветра. Но в то же время, реализация алгоритмов стабилизации оказалась далеко не идеальной… Например, эта система пытается бороться не только с внешними возмущениями, но и с действиями пилота, в результате чего заметно “зажимаются” расходы рулей, а сами маневры становятся дергаными и ступенчатыми. Также, нередко мне встречались сообщения о дрожании сервомашинок с этим стабилизатором и прочих неадекватностях.
Но не все так плохо, и ситуацию довольно легко исправить, попутно получив несколько весьма интересных и полезных возможностей.
Так как в качестве процессора в данном стабилизаторе используется распространенный контроллер AtMega 168PA, идея написать для него альтернативную прошивку, наверное, витала в воздухе с момента появления в продаже самой первой версии этого устройства. Чем и занялся один хороший человек из Чехии с ником Noobee ( http://www.rcgroups.com/forums/showthread.php?t=1794672 [rcgroups.com] )
Проект открытый и постоянно совершенствуется. Последний релиз ( https://github.com/noobee/FlightStab/tree/master/Builds [github.com] ) был от 22.03.2014, также в свободном доступе лежат и исходные тексты прошивки ( https://github.com/noobee/FlightStab/tree/master/FlightStab [github.com] ).
Проект поддерживает множество платформ. Это и все варианты “оранжевых” стабилизаторов (RX3S V1, V2, V3, RX3SM), и NanoWii, Hobby Eagle A3 Pro, Hobby King MINI MWC, Flip MWC 1.5…
Но вернемся к нашим баранам.
Подготовка для прошивки требуется минимальная. На плате стабилизатора уже имеются контактные площадки для подключения программатора, и их расположение соответствует разводке 6-контактного ISP-разъема AVR-программаторов (вроде USBAsp) http://www.parkflyer.ru/28725/product/817748/ [parkflyer.ru]


Контакты подписаны, так что, перепутать их будет трудно. Если же на вашем программаторе имеется только 10-контактный разъем, то можно будет сделать переходник:

Остается подпаять к контактным площадкам проводки или шестиконтактный разъем от старых компьютерных “железок”:

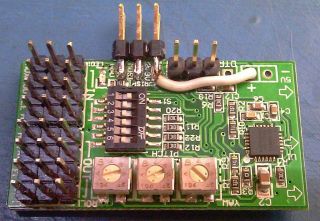
Обратите внимание, что процессор стабилизатора питается напряжением 3,3в. Если ваш программатор оснащен переключателем 3,3-5 вольт, не забудьте установить нужное напряжение!
Мой программатор был еще из старых партий и такой возможности не имел, поэтому питающую ножку в разъеме я припаивать не стал, а вывел ее проводком к соответствующей контактной площадке, благо, она на плате имеется и расположена довольно удобно.
Также стоит сразу припаять трехштырьковый разъем на контакты Tx, Rx, Gnd, т.к. они понадобятся для реализации отдельного канала для второго элерона и подключения стабилизатора через S.BUS или к Спектрумовскому сателлиту вместо полноценного приемника.
Внимание!!! Ни в коем случае не подавайте на пин Rx напряжение питания! Спалите процессор!
Немного поработав бормашинкой и ножом, в корпусе проделываются отверстия под новые разъемы:


Может, не очень красиво, зато функционально и доступно.
Теперь выбираем нужный вариант прошивки. Их для данного стабилизатора существует 5:
- обычное подключение через PWM-входы, дополнительный канал на второй элерон подключается к пину Tx; ( http://www.parkflyer.ru/static/user_files/2014/4/26/20140322_RX3S_V2.1401104901718.hex [parkflyer.ru] )
- обычное подключение через PWM-входы, дополнительный канал на второй элерон подключается ко входу Rud_In ( http://www.parkflyer.ru/static/user_files/2014/4/26/20140322_RX3S_V2_AILR_IN_ON_RUD_IN.1401104952575.hex [parkflyer.ru] ) для тех, кто не стал распаивать дополнительный разъем, но хочет задействовать раздельные элероны, потеряв стабилизацию по каналу руля направления
- вариант для подключения по CPPM; ( http://www.parkflyer.ru/static/user_files/2014/4/26/20140322_RX3S_V2_CPPM.1401105091126.hex [parkflyer.ru] )
- вариант для подключения по Sbus; ( http://www.parkflyer.ru/static/user_files/2014/4/26/20140322_RX3S_V2_SBUS.1401105125123.hex [parkflyer.ru] )
- вариант для подключения сателлита Spektrum вместо обычного приемника ( http://www.parkflyer.ru/static/user_files/2014/4/26/20140322_RX3S_V2_SPEKTRUM.1401105172170.hex [parkflyer.ru] )
Заливать прошивку можно при помощи любого программного обеспечения, поддерживающего AtMega168P(PA). Я использовал USBASP AVRDUDE PROG ( http://www.parkflyer.ru/static/user_files/2014/4/26/USBASP_AVRDUDE_PROG.1401105368750.rar [parkflyer.ru] ) довольно простую и удобную оболочку к AVRDude. В ней достаточно указать тип программируемого микроконтроллера, путь к файлу прошивки и выбрать нужный программатор:
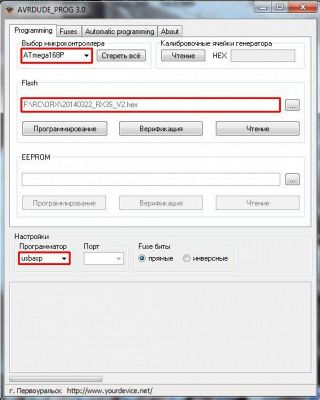
Перед программированием нужно полностью очистить чип, нажав кнопку “стереть все”. При этом старая прошивка будет безвозвратно потеряна, т.к. с завода в чипе стоит блокировка на чтение. Заодно и все фьюзы сбросятся на значения по умолчанию. Затем нажимаем кнопку “программирование” и, спустя несколько секунд, получаем устройство с новыми возможностями.
А они впечатляют:
- стабилизация полета на базе трехосевого гироскопа;
- 2 режима работы - “Rate” (парирование возмущений, то, что было изначально) и “Hold” (удержание положения);
- возможность настройки значений PID с помощью карт программирования для регуляторов хода серии AQUASTAR или dlux;
- включение\выключение стабилизации, переключение режимов и контроль чувствительности при помощи всего одного канала управления (AUX1);
- установка режимов микширования DIP-переключателями или с помощью карты программирования;
- поддержка различных режимов микширования: фиксированное крыло (с одной или двумя сервомашинками на элероны), режим элевонов для летающего крыла, V-образный хвост и т.п.;
- поддержка последовательных протоколов подключения: CPPM, S.BUS, Spektrum satellite, при этом каналы газа и с 6 по 8-й также выводятся через стабилизатор;
- настраиваемые конечные точки каналов для предотвращения повреждения сервомашинок;
- возможность настройки большинства параметров с передатчика или при помощи карты программирования;
- cохранение настроек в EEPROM (могут быть сброшены установкой джамперов перед включением);
- вспышки светодиода отображают режим работы и статус при каких либо ошибках;
- нулевое положение стиков калибруется при каждом включении устройства;
- возможность перекалибровки каналов управления в полете;
- автоматическая калибровка гироскопа при каждом включении, для предотвращения “уплывания” (после подключения модель нужно несколько секунд держать неподвижно, до подтверждения готовности взмахами элеронов);
- потенциометры на стабилизаторе регулируют как усиление, так и направление отработки рулей (реверсы);
- усиление стабилизации зависит от положения стиков: максимум в нулевой точке и плавно уменьшается до нуля при отклонении стика до 100%;
- стабилизатор теперь может быть установлен и на боковую поверхность фюзеляжа контурных моделей без изменения коммутации сервомашинок.
Здесь и далее пойдет вольный перевод инструкции к альтернативной прошивке, той ее части, что относится к RX3S v2. Все, что относится к другим платформам, смотрите в оригинальном документе ( https://docs.google.com/document/d/1UBKUB74xqSB0fVFe3MX-6d9QH1B4-LDRAf7nH9Qs1dY/pub [docs.google.com] )
Доступные режимы микширования:
Режим Расшифровка
RUDELE 1-AIL Классическая схема: руль направления, руль высоты, одна сервомашинка на элероны
DELTA 1-AIL Микшер элевонов (для летающего крыла и прочих бесхвосток). Поддерживается наличие руля направления.
VTAIL 1-AIL Микшер V-хвоста, одна сервомашинка на элероны
RUDELE 2-AIL Классическая схема: руль направления, руль высоты, две сервомашинки на элероны (возможна их работа в качестве флапперонов).
DELTA 2-AIL Наиболее “хитрый” режим. Раздельные половинки руля высоты работают как элевоны, а раздельные элероны могут выступать в роли закрылков, флапперонов или флаппероневаторов (флаппероны смикшированные с рулем высоты). Управление рулем направления отсутствует, вход RUD-IN используется для переключения “связанных” режимов работы элеронов.
VTAIL 2-AIL V-хвост с поддержкой флапперонов.
DUCKERON Расщепляемые элевоны (требуется по 2 машинки на каждый элевон). Используются в качестве руля направления и воздушного тормоза на моделях типа “летающее крыло” (например, копия стелс-бомбардировщика B2).
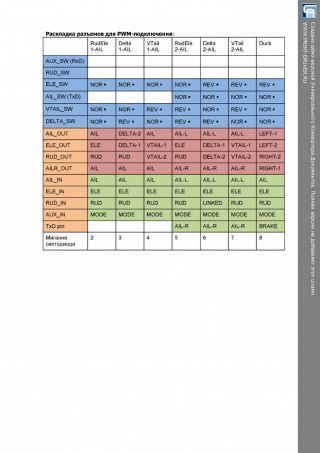
- Режимы микширования выбираются при помощи DIP-переключателей, настройкой с передатчика или картой программирования.
- При подключении стабилизатора по последовательным протоколам, канал AUX1 (5-й канал) используется для управления чувствительностью и переключения режимов работы стабилизации.
- Сателлиты Spektrum рассчитаны на питание 3,3 вольта, 5 вольт могут вывести их из строя! Питание для сателлита необходимо вывести отдельно, с контактной площадки ISP-разъема или при помощи внешнего стабилизатора. Также, сателлиты Spektrum не имеют функции Failsafe, т.к. не рассчитывались на использование отдельно от приемника.
Цветовая маркировка подключения:
Цвет Тип
Синий DIP-переключатели
Оранжевый Разъемы стабилизатора
Красный Выходы на сервомашинки или ESC
Зеленый Входы сигнала от приемника
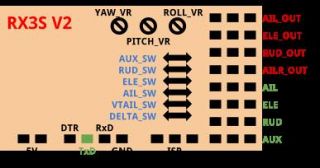
При использовании пина TxD для входа сигнала по каналу правого элерона или воздушного тормоза (AIL-R IN или BRAKE IN), переключатель AIL_SW обязательно должен быть установлен в положение NOR ▶!!!
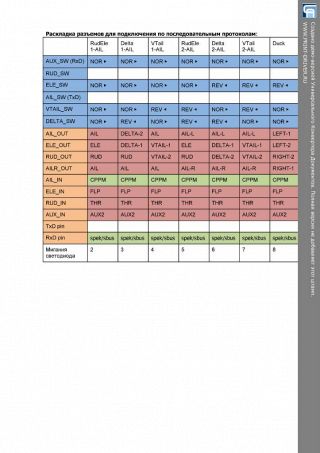
- При подключении сателлита Spektrum или S.BUS через последовательный порт (контакт RxD), переключатель AUX_SW обязательно должен быть установлен в положение NOR▶!!!
- Для подключения по S.BUS требуется инветировать сигнал.
- При подключении сателлита Spektrum или S.BUS, разъем AIL_IN остается незадействованным и может быть использован для подачи питания на приемник.
Основные инструкции.
Перед использованием любого режима стабилизации дважды убедитесь, что вы в любой момент сможете отключить стабилизацию с передатчика. Обязательно проверьте правильность направления отклонения рулей – они должны препятствовать изменению положения модели. Первые полеты лучше проводить при небольшой чувствительности, выставленной регуляторами на самом стабилизаторе и на достаточной высоте. Постепенно добавляйте чувствительность, но следите, чтобы не появилась раскачка в результате перестабилизации.
- Подключите устройство согласно таблицам. DIP-переключателями или с помощью карты программирования установите требуемую конфигурацию рулей (1 или 2 машинки на элероны, V-хвост, элевоны и т.п.).
- Если вы меняли положение переключателей на включенном устройстве, переподключите питание для применения новых настроек.
- Установите регуляторами требуемую чувствительность и направление отработки рулей для каждой оси (крен\тангаж\курс = roll\pitch\yaw) в отдельности. Поворот регулятора на 7 часов – максимальное усиление в одном направлении, на 12 часов – стабилизация по данной оси отключена, на 5 часов – максимальное усиление в другом направлении.
- Канал AUX1 позволяет линейно изменять общую чувствительность по всем осям от нуля до максимальной, установленной регуляторами на стабилизаторе. Также этот канал управляет режимами работы стабилизации RATE и HOLD. В среднем положении канала (1500нс) стабилизация отключена. В нижнем положении (<1100нс) получаем максимальное усиление для режима RATE(парирование возмущений). В верхнем положении (>1900нс) – максимальное усиление для режима HOLD (удержание положения). Управляющий канал лучше всего назначить на слайдер, крутилку или трехпозиционный тумблер. Можно оставить его и неподключенным, тогда стабилизация всегда будет работать в режиме RATE с чувствительностью, установленной регуляторами на стабилизаторе.
- В режиме RATE, между длинными вспышками светодиода, отображающими установленную конфигурацию рулей, будет просто пауза в несколько секунд. В режиме HOLD в это время даются 4 короткие вспышки. Для точной калибровки среднего положения управляющего канала, когда стабилизация отключена, установите тумблер или слайдер, на который назначена эта функция в среднее положение, а затем, при помощи субтриммера постарайтесь поймать момент между 4-мя вспышками светодиода в режиме HOLD и их отсутствием (режимом RATE).
- Чувствительность гироскопов также уменьшается при отклонении стиков. Она максимальна при стиках в нулевой позиции и линейно падает до нуля при отклонении стика к 100%. Это сделано для того, чтобы стабилизация не мешала выполнять резкие маневры.
Индикация состояния.
В серии миганий светодиода существует 4 слота для сообщений. Каждый слот – это серия вспышек, сообщающая о состоянии стабилизатора. Вспышки можно разделить на длинные – 600мс, короткие – 200мс и сверхкороткие – 30мс. Количество вспышек каждого типа составляют сообщение.

Калибровки при включении.
При включении питания устройство пытается откалибровать нейтральные позиции каналов управления и гироскоп в состоянии покоя. Во время калибровки старайтесь не смещать стики передатчика и удерживать модель неподвижно (неважно, в каком положении, хоть вверх ногами, лишь бы без движения). При задействованных флапперонах также нет разницы, в каком они положении будут при включении. Как только по всем каналам пойдут стабильные значения, они записываются в память процессора и используются в качестве точки отсчета.
Стабилизация будет задействована только после успешной калибровки как гироскопа, так и нейтральных точек каналов управления. Об успешном завершении калибровки сообщают:
- 3 взмаха элеронами;
- отсутствие в серии вспышек светодиода калибровочных последовательностей;
- адекватная реакция рулей на изменение положения модели (согласно режиму стабилизации).
При кратковременном пропадании питания в воздухе устройство снова запустит калибровку. Естественно, в таких условиях успешной она быть не может. В этом случае сигналы управления проходят напрямую на сервомашинки, позволяя вам управлять моделью и совершить успешную посадку, но без какой либо стабилизации.
Режимы стабилизации.
Канал AUX1 позволяет переключаться между двумя режимами стабилизации RATE или HOLD.
- Режим RATE
В этом режиме осуществляется стабилизация по осям крена, тангажа и рысканья, путем парирования вращений. Регуляторы (или значения, сохраненные в EEPROM) задают максимальную чувствительность стабилизации и направление отработки рулей по каждой оси в отдельности. Интеграционная составляющая PID всегда равна нулю, поэтому устройство не накапливает ошибки. Значения PID по умолчанию – 500-0-500.
- Режим удержания положения - Attitude HOLD
Удержание положения позволяет модели лететь при отпущенных ручках управления в заданной ориентации так долго, насколько это позволяют тяговооруженность и “уплывание” гироскопов. Как только стик был отклонен от нулевой точки для корректировки дрейфа, значение канала добавляется в “I” составляющую PID и начинается накопление ошибки между требуемым положением модели и текущим значением, считанным с гироскопов. Чем выше значение ошибки, тем более агрессивную корректировку предпринимает стабилизатор, пока значение ошибки не упадет до нуля. Значения PID по умолчанию – 500-500-500.
Триммирование.
Триммирование модели в полете при включенной стабилизацией возможно, но имеет некоторые особенности. В режиме RATE можно проводить триммирование без ограничений, но, так как, фактически, при этом смещаются нулевые точки каналов управления, могут возникнуть проблемы в режиме HOLD. Таким образом, если вам пришлось значительно триммироватьмодель, воздержитесь от использования режима удержания положения.
Сброс нулевых точек в полете.
Калибровка каналов управления в воздухе по умолчанию включена, но может быть отключена при помощи карты программирования или настройкой с передатчика. Эта функция активируется при трехкратном переключении режимов RATE\HOLD в течение 0,5 секунды.
Настройка конечных точек.
Существует 3 варианта установки конечных точек по всем каналам:

При включении Адаптивного режима конечных точек, сервомашинки никогда не отклонятся больше, чем это было бы возможно при прямом их подключении к приемнику, что позволяет избежать поломки машинок или рулей. Но, если эта функция активирована, вам нужно будет перед каждым полетом довести стики до максимальных значений, чтобы “обучить” стабилизатор нужным значениям конечных точек. Иначе стабилизатором может быть установлено слишком малое значение коррекции, основанное на неполных отклонениях стиков.
Подключение по CPPM.
Некоторые приемники могут выдавать комплексный PPM сигнал (содержащий данные по всем каналам одновременно). Это устройство (с соответствующим вариантом прошивки) также поддерживает подключение по CPPM. Такой вариант сокращает количество соединений между приемником и стабилизатором, а также позволяет вывести большее число каналов через разъемы стабилизатора, в том числе газ, AUX2 и FLAP (обычно, 7-8 каналы).
Подключение по S.BUS и сателлитов Spektrum.
Эти режимы очень похожи на вариант CPPM. Так же, как и в предыдущем случае, требуется всего один кабель для соединения с приемником. Но, в отличие от CPPM, протоколы S.BUS и Spektrum – цифровые, что исключает какую либо возможность ошибки измерения длины импульсов.
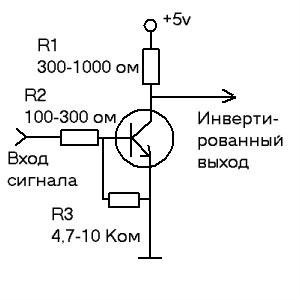
Сателлиты Spektrum передают данные в обычном для RS-232, негативном формате 115,200 Baud, что позволяет легко их декодировать. S.BUS же выдает позитивный 100,000 Baud RS-232 сигнал, который, перед декодированием в стабилизаторе, должен быть инвертирован. Для этого можно взять как готовые устройства, вроде Tarot FYTLZYX10, так и спаять простейший инвертер на биполярном n-p-n транзисторе.
S.BUS и Spektrum передают данные слишком быстро для большинства аналоговых машинок, поэтому параметр SERVO_FRAME_RATE должен быть установлен в пределах 0мс – 20мс, при этом значение, равное 0, говорит, что входные данные передаются на выход с той же скоростью.
Порядок следования каналов при последовательном подключении может быть изменен только с помощью карты программирования. По умолчанию, порядок каналов установлен: 1 - AIL-L, 2 - ELE, 3 - THR, 4 - RUD, 5 - AUX1 (mode), 6 - AIL-R, 7 - AUX2, 8 - FLP (по крайней мере, у меня при подключении приемника X8R по S.BUS получилась именно такая последовательность). Для аппаратур с произвольно назначаемыми каналами (например, все платформы, поддерживаемые прошивками ER9X/OpenTX) это не проблема - их всегда можно перенастроить. В случае же передатчиков с жестко фиксированным порядком каналов это нужно иметь в виду.
Также, с помощью карты можно установить разрешение сигнала для сателлитов Spektrum 1024 или 2048 – значение должно соответствовать разрешению передатчика.
Установка устройства на модели.
Нормальная установка:
Монтаж на горизонтальной поверхности разъемами вверх (0 град.) или вниз (180 град.). Это стандартный вариант установки. Никаких дополнительных настроек не требуется.
Установка на боковой поверхности:
Устройство поддерживает монтаж на боковой поверхности фюзеляжа контурных моделей без перекоммутации управляющих каналов и сервомашинок. Ориентация выбирается при настройке с передатчика или картой программирования.
Режим настройки стабилизатора при помощи передатчика.
Для входа в режим программирования, нужно в течение 15 секунд после включения питания перевести правый стик (для передатчиков mode 2) в положение 7-9-7-9-7. Номера позиций соответствуют клавиатуре телефона.
1 2 3
4 5 6
7 8 9
В режиме программирования, количество взмахов элеронами указывает программируемый параметр, а кол-во взмахов рулем высоты – устанавливаемое значение.
Перемещайте стик элеронов вправо-влево для выбора параметров. Для изменения значений выбранного параметра перемещайте стик руля высоты вверх-вниз.
Выбор последнего пункта в меню (выход) и изменение значения с 1 на 2 запускает процесс сохранения настроек в EEPROM и перезагружает стабилизатор. Это единственный вариант выхода из режима программирования. При переподключении питания настройки не сохраняются.
В таблице ниже приведены все параметры, доступные для программирования. Часть из них можно изменить при помощи передатчика, но некоторые доступны только при помощи карты программирования.
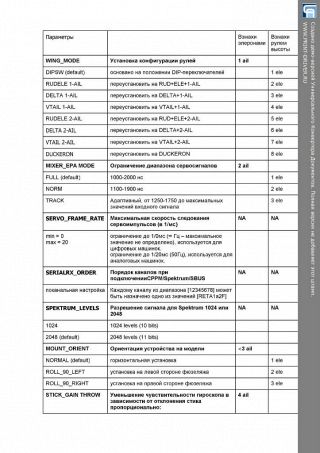


- NA – параметр недоступен при настройке с передатчика и может быть изменен только картой программирования.
Обнуление EEPROM
Для сброса EEPROM на значения по умолчанию, установите джампер на сигнальные выводы каналов AIL-L_OUT и ELE_OUT перед подключением питания.
При перезагрузке стабилизатор очистит EEPROM и будет мигать светодиодом с трехсекундным интервалом, это будет означать, что вы можете отключить питание и снять джампер. Процесс очистки памяти завершен.
Обычно, при включении питания модель 3 раза взмахивает элеронами, подтверждая успешную калибровку. При первом включении после сброса настроек, модель должна сделать 9 взмахов элеронами. Такое же поведение характерно для отображения сбоев в EEPROM, если вы не делали сброса настроек.
Особая благодарность за статью Шиляеву Алексею, Можга
Счастлив тот кто не врёт, кто придуманным живёт
Многим знакома недорогая система стабилизации полета от OrangeRX. Предполагалось, что она будет подспорьем начинающим пилотам, позволяя им меньше отвлекаться на борьбу с ветром, а также даст возможность выполнять более ровные и красивые полеты. В каком-то смысле это удалось - стабилизатор действительно неплохо парирует порывы ветра. Но в то же время, реализация алгоритмов стабилизации оказалась далеко не идеальной… Например, эта система пытается бороться не только с внешними возмущениями, но и с действиями пилота, в результате чего заметно “зажимаются” расходы рулей, а сами маневры становятся дергаными и ступенчатыми. Также, нередко мне встречались сообщения о дрожании сервомашинок с этим стабилизатором и прочих неадекватностях.
Но не все так плохо, и ситуацию довольно легко исправить, попутно получив несколько весьма интересных и полезных возможностей.
Так как в качестве процессора в данном стабилизаторе используется распространенный контроллер AtMega 168PA, идея написать для него альтернативную прошивку, наверное, витала в воздухе с момента появления в продаже самой первой версии этого устройства. Чем и занялся один хороший человек из Чехии с ником Noobee ( http://www.rcgroups.com/forums/showthread.php?t=1794672 [rcgroups.com] )
Проект открытый и постоянно совершенствуется. Последний релиз ( https://github.com/noobee/FlightStab/tree/master/Builds [github.com] ) был от 22.03.2014, также в свободном доступе лежат и исходные тексты прошивки ( https://github.com/noobee/FlightStab/tree/master/FlightStab [github.com] ).
Проект поддерживает множество платформ. Это и все варианты “оранжевых” стабилизаторов (RX3S V1, V2, V3, RX3SM), и NanoWii, Hobby Eagle A3 Pro, Hobby King MINI MWC, Flip MWC 1.5…
Но вернемся к нашим баранам.
Подготовка для прошивки требуется минимальная. На плате стабилизатора уже имеются контактные площадки для подключения программатора, и их расположение соответствует разводке 6-контактного ISP-разъема AVR-программаторов (вроде USBAsp) http://www.parkflyer.ru/28725/product/817748/ [parkflyer.ru]
Контакты подписаны, так что, перепутать их будет трудно. Если же на вашем программаторе имеется только 10-контактный разъем, то можно будет сделать переходник:
Остается подпаять к контактным площадкам проводки или шестиконтактный разъем от старых компьютерных “железок”:
Обратите внимание, что процессор стабилизатора питается напряжением 3,3в. Если ваш программатор оснащен переключателем 3,3-5 вольт, не забудьте установить нужное напряжение!
Мой программатор был еще из старых партий и такой возможности не имел, поэтому питающую ножку в разъеме я припаивать не стал, а вывел ее проводком к соответствующей контактной площадке, благо, она на плате имеется и расположена довольно удобно.
Также стоит сразу припаять трехштырьковый разъем на контакты Tx, Rx, Gnd, т.к. они понадобятся для реализации отдельного канала для второго элерона и подключения стабилизатора через S.BUS или к Спектрумовскому сателлиту вместо полноценного приемника.
Внимание!!! Ни в коем случае не подавайте на пин Rx напряжение питания! Спалите процессор!
Немного поработав бормашинкой и ножом, в корпусе проделываются отверстия под новые разъемы:
Может, не очень красиво, зато функционально и доступно.
Теперь выбираем нужный вариант прошивки. Их для данного стабилизатора существует 5:
- обычное подключение через PWM-входы, дополнительный канал на второй элерон подключается к пину Tx; ( http://www.parkflyer.ru/static/user_files/2014/4/26/20140322_RX3S_V2.1401104901718.hex [parkflyer.ru] )
- обычное подключение через PWM-входы, дополнительный канал на второй элерон подключается ко входу Rud_In ( http://www.parkflyer.ru/static/user_files/2014/4/26/20140322_RX3S_V2_AILR_IN_ON_RUD_IN.1401104952575.hex [parkflyer.ru] ) для тех, кто не стал распаивать дополнительный разъем, но хочет задействовать раздельные элероны, потеряв стабилизацию по каналу руля направления
- вариант для подключения по CPPM; ( http://www.parkflyer.ru/static/user_files/2014/4/26/20140322_RX3S_V2_CPPM.1401105091126.hex [parkflyer.ru] )
- вариант для подключения по Sbus; ( http://www.parkflyer.ru/static/user_files/2014/4/26/20140322_RX3S_V2_SBUS.1401105125123.hex [parkflyer.ru] )
- вариант для подключения сателлита Spektrum вместо обычного приемника ( http://www.parkflyer.ru/static/user_files/2014/4/26/20140322_RX3S_V2_SPEKTRUM.1401105172170.hex [parkflyer.ru] )
Заливать прошивку можно при помощи любого программного обеспечения, поддерживающего AtMega168P(PA). Я использовал USBASP AVRDUDE PROG ( http://www.parkflyer.ru/static/user_files/2014/4/26/USBASP_AVRDUDE_PROG.1401105368750.rar [parkflyer.ru] ) довольно простую и удобную оболочку к AVRDude. В ней достаточно указать тип программируемого микроконтроллера, путь к файлу прошивки и выбрать нужный программатор:
Перед программированием нужно полностью очистить чип, нажав кнопку “стереть все”. При этом старая прошивка будет безвозвратно потеряна, т.к. с завода в чипе стоит блокировка на чтение. Заодно и все фьюзы сбросятся на значения по умолчанию. Затем нажимаем кнопку “программирование” и, спустя несколько секунд, получаем устройство с новыми возможностями.
А они впечатляют:
- стабилизация полета на базе трехосевого гироскопа;
- 2 режима работы - “Rate” (парирование возмущений, то, что было изначально) и “Hold” (удержание положения);
- возможность настройки значений PID с помощью карт программирования для регуляторов хода серии AQUASTAR или dlux;
- включение\выключение стабилизации, переключение режимов и контроль чувствительности при помощи всего одного канала управления (AUX1);
- установка режимов микширования DIP-переключателями или с помощью карты программирования;
- поддержка различных режимов микширования: фиксированное крыло (с одной или двумя сервомашинками на элероны), режим элевонов для летающего крыла, V-образный хвост и т.п.;
- поддержка последовательных протоколов подключения: CPPM, S.BUS, Spektrum satellite, при этом каналы газа и с 6 по 8-й также выводятся через стабилизатор;
- настраиваемые конечные точки каналов для предотвращения повреждения сервомашинок;
- возможность настройки большинства параметров с передатчика или при помощи карты программирования;
- cохранение настроек в EEPROM (могут быть сброшены установкой джамперов перед включением);
- вспышки светодиода отображают режим работы и статус при каких либо ошибках;
- нулевое положение стиков калибруется при каждом включении устройства;
- возможность перекалибровки каналов управления в полете;
- автоматическая калибровка гироскопа при каждом включении, для предотвращения “уплывания” (после подключения модель нужно несколько секунд держать неподвижно, до подтверждения готовности взмахами элеронов);
- потенциометры на стабилизаторе регулируют как усиление, так и направление отработки рулей (реверсы);
- усиление стабилизации зависит от положения стиков: максимум в нулевой точке и плавно уменьшается до нуля при отклонении стика до 100%;
- стабилизатор теперь может быть установлен и на боковую поверхность фюзеляжа контурных моделей без изменения коммутации сервомашинок.
Здесь и далее пойдет вольный перевод инструкции к альтернативной прошивке, той ее части, что относится к RX3S v2. Все, что относится к другим платформам, смотрите в оригинальном документе ( https://docs.google.com/document/d/1UBKUB74xqSB0fVFe3MX-6d9QH1B4-LDRAf7nH9Qs1dY/pub [docs.google.com] )
Доступные режимы микширования:
Режим Расшифровка
RUDELE 1-AIL Классическая схема: руль направления, руль высоты, одна сервомашинка на элероны
DELTA 1-AIL Микшер элевонов (для летающего крыла и прочих бесхвосток). Поддерживается наличие руля направления.
VTAIL 1-AIL Микшер V-хвоста, одна сервомашинка на элероны
RUDELE 2-AIL Классическая схема: руль направления, руль высоты, две сервомашинки на элероны (возможна их работа в качестве флапперонов).
DELTA 2-AIL Наиболее “хитрый” режим. Раздельные половинки руля высоты работают как элевоны, а раздельные элероны могут выступать в роли закрылков, флапперонов или флаппероневаторов (флаппероны смикшированные с рулем высоты). Управление рулем направления отсутствует, вход RUD-IN используется для переключения “связанных” режимов работы элеронов.
VTAIL 2-AIL V-хвост с поддержкой флапперонов.
DUCKERON Расщепляемые элевоны (требуется по 2 машинки на каждый элевон). Используются в качестве руля направления и воздушного тормоза на моделях типа “летающее крыло” (например, копия стелс-бомбардировщика B2).
- Режимы микширования выбираются при помощи DIP-переключателей, настройкой с передатчика или картой программирования.
- При подключении стабилизатора по последовательным протоколам, канал AUX1 (5-й канал) используется для управления чувствительностью и переключения режимов работы стабилизации.
- Сателлиты Spektrum рассчитаны на питание 3,3 вольта, 5 вольт могут вывести их из строя! Питание для сателлита необходимо вывести отдельно, с контактной площадки ISP-разъема или при помощи внешнего стабилизатора. Также, сателлиты Spektrum не имеют функции Failsafe, т.к. не рассчитывались на использование отдельно от приемника.
Цветовая маркировка подключения:
Цвет Тип
Синий DIP-переключатели
Оранжевый Разъемы стабилизатора
Красный Выходы на сервомашинки или ESC
Зеленый Входы сигнала от приемника
При использовании пина TxD для входа сигнала по каналу правого элерона или воздушного тормоза (AIL-R IN или BRAKE IN), переключатель AIL_SW обязательно должен быть установлен в положение NOR ▶!!!
- При подключении сателлита Spektrum или S.BUS через последовательный порт (контакт RxD), переключатель AUX_SW обязательно должен быть установлен в положение NOR▶!!!
- Для подключения по S.BUS требуется инветировать сигнал.
- При подключении сателлита Spektrum или S.BUS, разъем AIL_IN остается незадействованным и может быть использован для подачи питания на приемник.
Основные инструкции.
Перед использованием любого режима стабилизации дважды убедитесь, что вы в любой момент сможете отключить стабилизацию с передатчика. Обязательно проверьте правильность направления отклонения рулей – они должны препятствовать изменению положения модели. Первые полеты лучше проводить при небольшой чувствительности, выставленной регуляторами на самом стабилизаторе и на достаточной высоте. Постепенно добавляйте чувствительность, но следите, чтобы не появилась раскачка в результате перестабилизации.
- Подключите устройство согласно таблицам. DIP-переключателями или с помощью карты программирования установите требуемую конфигурацию рулей (1 или 2 машинки на элероны, V-хвост, элевоны и т.п.).
- Если вы меняли положение переключателей на включенном устройстве, переподключите питание для применения новых настроек.
- Установите регуляторами требуемую чувствительность и направление отработки рулей для каждой оси (крен\тангаж\курс = roll\pitch\yaw) в отдельности. Поворот регулятора на 7 часов – максимальное усиление в одном направлении, на 12 часов – стабилизация по данной оси отключена, на 5 часов – максимальное усиление в другом направлении.
- Канал AUX1 позволяет линейно изменять общую чувствительность по всем осям от нуля до максимальной, установленной регуляторами на стабилизаторе. Также этот канал управляет режимами работы стабилизации RATE и HOLD. В среднем положении канала (1500нс) стабилизация отключена. В нижнем положении (<1100нс) получаем максимальное усиление для режима RATE(парирование возмущений). В верхнем положении (>1900нс) – максимальное усиление для режима HOLD (удержание положения). Управляющий канал лучше всего назначить на слайдер, крутилку или трехпозиционный тумблер. Можно оставить его и неподключенным, тогда стабилизация всегда будет работать в режиме RATE с чувствительностью, установленной регуляторами на стабилизаторе.
- В режиме RATE, между длинными вспышками светодиода, отображающими установленную конфигурацию рулей, будет просто пауза в несколько секунд. В режиме HOLD в это время даются 4 короткие вспышки. Для точной калибровки среднего положения управляющего канала, когда стабилизация отключена, установите тумблер или слайдер, на который назначена эта функция в среднее положение, а затем, при помощи субтриммера постарайтесь поймать момент между 4-мя вспышками светодиода в режиме HOLD и их отсутствием (режимом RATE).
- Чувствительность гироскопов также уменьшается при отклонении стиков. Она максимальна при стиках в нулевой позиции и линейно падает до нуля при отклонении стика к 100%. Это сделано для того, чтобы стабилизация не мешала выполнять резкие маневры.
Индикация состояния.
В серии миганий светодиода существует 4 слота для сообщений. Каждый слот – это серия вспышек, сообщающая о состоянии стабилизатора. Вспышки можно разделить на длинные – 600мс, короткие – 200мс и сверхкороткие – 30мс. Количество вспышек каждого типа составляют сообщение.
Калибровки при включении.
При включении питания устройство пытается откалибровать нейтральные позиции каналов управления и гироскоп в состоянии покоя. Во время калибровки старайтесь не смещать стики передатчика и удерживать модель неподвижно (неважно, в каком положении, хоть вверх ногами, лишь бы без движения). При задействованных флапперонах также нет разницы, в каком они положении будут при включении. Как только по всем каналам пойдут стабильные значения, они записываются в память процессора и используются в качестве точки отсчета.
Стабилизация будет задействована только после успешной калибровки как гироскопа, так и нейтральных точек каналов управления. Об успешном завершении калибровки сообщают:
- 3 взмаха элеронами;
- отсутствие в серии вспышек светодиода калибровочных последовательностей;
- адекватная реакция рулей на изменение положения модели (согласно режиму стабилизации).
При кратковременном пропадании питания в воздухе устройство снова запустит калибровку. Естественно, в таких условиях успешной она быть не может. В этом случае сигналы управления проходят напрямую на сервомашинки, позволяя вам управлять моделью и совершить успешную посадку, но без какой либо стабилизации.
Режимы стабилизации.
Канал AUX1 позволяет переключаться между двумя режимами стабилизации RATE или HOLD.
- Режим RATE
В этом режиме осуществляется стабилизация по осям крена, тангажа и рысканья, путем парирования вращений. Регуляторы (или значения, сохраненные в EEPROM) задают максимальную чувствительность стабилизации и направление отработки рулей по каждой оси в отдельности. Интеграционная составляющая PID всегда равна нулю, поэтому устройство не накапливает ошибки. Значения PID по умолчанию – 500-0-500.
- Режим удержания положения - Attitude HOLD
Удержание положения позволяет модели лететь при отпущенных ручках управления в заданной ориентации так долго, насколько это позволяют тяговооруженность и “уплывание” гироскопов. Как только стик был отклонен от нулевой точки для корректировки дрейфа, значение канала добавляется в “I” составляющую PID и начинается накопление ошибки между требуемым положением модели и текущим значением, считанным с гироскопов. Чем выше значение ошибки, тем более агрессивную корректировку предпринимает стабилизатор, пока значение ошибки не упадет до нуля. Значения PID по умолчанию – 500-500-500.
Триммирование.
Триммирование модели в полете при включенной стабилизацией возможно, но имеет некоторые особенности. В режиме RATE можно проводить триммирование без ограничений, но, так как, фактически, при этом смещаются нулевые точки каналов управления, могут возникнуть проблемы в режиме HOLD. Таким образом, если вам пришлось значительно триммироватьмодель, воздержитесь от использования режима удержания положения.
Сброс нулевых точек в полете.
Калибровка каналов управления в воздухе по умолчанию включена, но может быть отключена при помощи карты программирования или настройкой с передатчика. Эта функция активируется при трехкратном переключении режимов RATE\HOLD в течение 0,5 секунды.
Настройка конечных точек.
Существует 3 варианта установки конечных точек по всем каналам:
При включении Адаптивного режима конечных точек, сервомашинки никогда не отклонятся больше, чем это было бы возможно при прямом их подключении к приемнику, что позволяет избежать поломки машинок или рулей. Но, если эта функция активирована, вам нужно будет перед каждым полетом довести стики до максимальных значений, чтобы “обучить” стабилизатор нужным значениям конечных точек. Иначе стабилизатором может быть установлено слишком малое значение коррекции, основанное на неполных отклонениях стиков.
Подключение по CPPM.
Некоторые приемники могут выдавать комплексный PPM сигнал (содержащий данные по всем каналам одновременно). Это устройство (с соответствующим вариантом прошивки) также поддерживает подключение по CPPM. Такой вариант сокращает количество соединений между приемником и стабилизатором, а также позволяет вывести большее число каналов через разъемы стабилизатора, в том числе газ, AUX2 и FLAP (обычно, 7-8 каналы).
Подключение по S.BUS и сателлитов Spektrum.
Эти режимы очень похожи на вариант CPPM. Так же, как и в предыдущем случае, требуется всего один кабель для соединения с приемником. Но, в отличие от CPPM, протоколы S.BUS и Spektrum – цифровые, что исключает какую либо возможность ошибки измерения длины импульсов.
Сателлиты Spektrum передают данные в обычном для RS-232, негативном формате 115,200 Baud, что позволяет легко их декодировать. S.BUS же выдает позитивный 100,000 Baud RS-232 сигнал, который, перед декодированием в стабилизаторе, должен быть инвертирован. Для этого можно взять как готовые устройства, вроде Tarot FYTLZYX10, так и спаять простейший инвертер на биполярном n-p-n транзисторе.
S.BUS и Spektrum передают данные слишком быстро для большинства аналоговых машинок, поэтому параметр SERVO_FRAME_RATE должен быть установлен в пределах 0мс – 20мс, при этом значение, равное 0, говорит, что входные данные передаются на выход с той же скоростью.
Порядок следования каналов при последовательном подключении может быть изменен только с помощью карты программирования. По умолчанию, порядок каналов установлен: 1 - AIL-L, 2 - ELE, 3 - THR, 4 - RUD, 5 - AUX1 (mode), 6 - AIL-R, 7 - AUX2, 8 - FLP (по крайней мере, у меня при подключении приемника X8R по S.BUS получилась именно такая последовательность). Для аппаратур с произвольно назначаемыми каналами (например, все платформы, поддерживаемые прошивками ER9X/OpenTX) это не проблема - их всегда можно перенастроить. В случае же передатчиков с жестко фиксированным порядком каналов это нужно иметь в виду.
Также, с помощью карты можно установить разрешение сигнала для сателлитов Spektrum 1024 или 2048 – значение должно соответствовать разрешению передатчика.
Установка устройства на модели.
Нормальная установка:
Монтаж на горизонтальной поверхности разъемами вверх (0 град.) или вниз (180 град.). Это стандартный вариант установки. Никаких дополнительных настроек не требуется.
Установка на боковой поверхности:
Устройство поддерживает монтаж на боковой поверхности фюзеляжа контурных моделей без перекоммутации управляющих каналов и сервомашинок. Ориентация выбирается при настройке с передатчика или картой программирования.
Режим настройки стабилизатора при помощи передатчика.
Для входа в режим программирования, нужно в течение 15 секунд после включения питания перевести правый стик (для передатчиков mode 2) в положение 7-9-7-9-7. Номера позиций соответствуют клавиатуре телефона.
1 2 3
4 5 6
7 8 9
В режиме программирования, количество взмахов элеронами указывает программируемый параметр, а кол-во взмахов рулем высоты – устанавливаемое значение.
Перемещайте стик элеронов вправо-влево для выбора параметров. Для изменения значений выбранного параметра перемещайте стик руля высоты вверх-вниз.
Выбор последнего пункта в меню (выход) и изменение значения с 1 на 2 запускает процесс сохранения настроек в EEPROM и перезагружает стабилизатор. Это единственный вариант выхода из режима программирования. При переподключении питания настройки не сохраняются.
В таблице ниже приведены все параметры, доступные для программирования. Часть из них можно изменить при помощи передатчика, но некоторые доступны только при помощи карты программирования.
- NA – параметр недоступен при настройке с передатчика и может быть изменен только картой программирования.
Обнуление EEPROM
Для сброса EEPROM на значения по умолчанию, установите джампер на сигнальные выводы каналов AIL-L_OUT и ELE_OUT перед подключением питания.
При перезагрузке стабилизатор очистит EEPROM и будет мигать светодиодом с трехсекундным интервалом, это будет означать, что вы можете отключить питание и снять джампер. Процесс очистки памяти завершен.
Обычно, при включении питания модель 3 раза взмахивает элеронами, подтверждая успешную калибровку. При первом включении после сброса настроек, модель должна сделать 9 взмахов элеронами. Такое же поведение характерно для отображения сбоев в EEPROM, если вы не делали сброса настроек.
Особая благодарность за статью Шиляеву Алексею, Можга
Счастлив тот кто не врёт, кто придуманным живёт
Офлайн
Друзья сайта
- www.vipatovo.ru - Ипатовский информационный портал
- www.rc-box.ru - Красноярский форум моделистов.