- Вы не вошли.
Объявления
#1 Авг. 15, 2012 20:01:31
- CAMELION
-

-

- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5864
- Репутация:
 12
12 
- Профиль Отправить e-mail
Если вы новичёк или как настроить вертолёт!
Немного о производителях
Align http://www.align.com.tw/ [align.com.tw]
Align (Тайвань) Один из ведущих производителей радиоуправляемых вертолетов (линейка T-Rex) и запчастей к ним.
APC http://www.apcprop.com/ [apcprop.com]
APC (Landing Products, USA). Производит одни из самых лучших в мире пропеллеров для авиамоделей.
Dualsky http://www.dualsky.com/ [dualsky.com]
Dualsky (Китай). Производитель Li-Pol аккумуляторов, бесколлекторных электромоторов, электроники и аксессуаров для моделей.
Hitec RCD http://www.hitec-rc.ru/ [hitec-rc.ru]
Hitec RCD (Корея). Производитель самых популярных в мире систем радиоуправления, серво, приемников, электронных регуляторов скорости, и другой электроники для радиоуправляемых моделей.
HYPERION http://www.hyperion.hk/ [hyperion.hk]
HYPERION (Гон Конг). Известный производитель радиоуправляемых авиамоделей, Li-Pol и LiFePO4 аккумуляторов, зарядных устройств, бесколлекторных моторов, регуляторов скорости, модельной электроники и различных аксессуаров.
Thunder Tiger http://www.thundertiger.ru/ [thundertiger.ru]
Thunder Tiger. Один из крупнейших в мире производителей продукции для моделизма и хобби. Имеет собственные подразделения в США и Германии. Продукция изготавливается с использованием автоматизированных комплексов и станков с ЧПУ на трех заводах - в Тайване и в Китае. Заводы оборудованы по последнему слову техники. Высокое качество продукции подтверждает международный сертификат ISO9001 и многочисленные победы в престижных выставках и международных соревнованиях. Огромный ассортимент радиоуправляемых моделей разного класса и сопутствующей продукции. Радиоуправляемые авиамодели, автомодели, модели вертолетов серии Raptor, судомодели, запчасти, аксессуары, двигатели, аппаратура радиоуправления, стартовое оборудование, комплектующие и многое другое (более 3000 наименований).
Walkera http://www.walkera.com/ [walkera.com]
Walkera (Китай). Производитель популярных электрических радиоуправляемых моделей вертолетов, авиамоделей, аксессуаров и электроники для моделей.
взято: http://www.rc-heli.com.ua/Vendors.aspx [rc-heli.com.ua]
Счастлив тот кто не врёт, кто придуманным живёт
Align http://www.align.com.tw/ [align.com.tw]
Align (Тайвань) Один из ведущих производителей радиоуправляемых вертолетов (линейка T-Rex) и запчастей к ним.
APC http://www.apcprop.com/ [apcprop.com]
APC (Landing Products, USA). Производит одни из самых лучших в мире пропеллеров для авиамоделей.
Dualsky http://www.dualsky.com/ [dualsky.com]
Dualsky (Китай). Производитель Li-Pol аккумуляторов, бесколлекторных электромоторов, электроники и аксессуаров для моделей.
Hitec RCD http://www.hitec-rc.ru/ [hitec-rc.ru]
Hitec RCD (Корея). Производитель самых популярных в мире систем радиоуправления, серво, приемников, электронных регуляторов скорости, и другой электроники для радиоуправляемых моделей.
HYPERION http://www.hyperion.hk/ [hyperion.hk]
HYPERION (Гон Конг). Известный производитель радиоуправляемых авиамоделей, Li-Pol и LiFePO4 аккумуляторов, зарядных устройств, бесколлекторных моторов, регуляторов скорости, модельной электроники и различных аксессуаров.
Thunder Tiger http://www.thundertiger.ru/ [thundertiger.ru]
Thunder Tiger. Один из крупнейших в мире производителей продукции для моделизма и хобби. Имеет собственные подразделения в США и Германии. Продукция изготавливается с использованием автоматизированных комплексов и станков с ЧПУ на трех заводах - в Тайване и в Китае. Заводы оборудованы по последнему слову техники. Высокое качество продукции подтверждает международный сертификат ISO9001 и многочисленные победы в престижных выставках и международных соревнованиях. Огромный ассортимент радиоуправляемых моделей разного класса и сопутствующей продукции. Радиоуправляемые авиамодели, автомодели, модели вертолетов серии Raptor, судомодели, запчасти, аксессуары, двигатели, аппаратура радиоуправления, стартовое оборудование, комплектующие и многое другое (более 3000 наименований).
Walkera http://www.walkera.com/ [walkera.com]
Walkera (Китай). Производитель популярных электрических радиоуправляемых моделей вертолетов, авиамоделей, аксессуаров и электроники для моделей.
взято: http://www.rc-heli.com.ua/Vendors.aspx [rc-heli.com.ua]
Счастлив тот кто не врёт, кто придуманным живёт
Офлайн
#2 Авг. 22, 2012 16:10:55
- CAMELION
-
-
- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5864
- Репутация:
12
- Профиль Отправить e-mail
Если вы новичёк или как настроить вертолёт!
Система стабилизации.
Натолкнулся в интернете на девайс который может сильно помочь новичкам. GYROBOT 900. Флайбарлесс система с системой стабилизации и тремя режимами полета:
1. Начинающий 1 (вертолет нельзя перевернуть, обучение полетам в “нормале”)
2. Начинающий 2 (вертолет может стабилизироваться в нормале и инверте)
3. 3Д “без ограничений и стабилизации”
В режиме стабилизации можно бросить ручки и верт “встанет в горизонт”.
Про 3Д режим сказать ничего не могу, а про первые два - очень нужные. Если вспомнить как начинал и сколько раз падал, такая гира могла сэкономить и время и деньги. Цена на данный гироскоп 620USD, дороговато но мне кажется отобьется. Каждое падение на 30-90 классе примерно на 100 USD - 6 падений и вы уже в плюсе. Прогресс обучения я думаю тоже пойдет быстрее, увереннее себя чувствуешь, активнее летаешь, не тратишь время на ремонты.



Взято: http://heli-spb.ru/forumheli/index.php?topic=2405.0 [heli-spb.ru]
Счастлив тот кто не врёт, кто придуманным живёт
Натолкнулся в интернете на девайс который может сильно помочь новичкам. GYROBOT 900. Флайбарлесс система с системой стабилизации и тремя режимами полета:
1. Начинающий 1 (вертолет нельзя перевернуть, обучение полетам в “нормале”)
2. Начинающий 2 (вертолет может стабилизироваться в нормале и инверте)
3. 3Д “без ограничений и стабилизации”
В режиме стабилизации можно бросить ручки и верт “встанет в горизонт”.
Про 3Д режим сказать ничего не могу, а про первые два - очень нужные. Если вспомнить как начинал и сколько раз падал, такая гира могла сэкономить и время и деньги. Цена на данный гироскоп 620USD, дороговато но мне кажется отобьется. Каждое падение на 30-90 классе примерно на 100 USD - 6 падений и вы уже в плюсе. Прогресс обучения я думаю тоже пойдет быстрее, увереннее себя чувствуешь, активнее летаешь, не тратишь время на ремонты.
Взято: http://heli-spb.ru/forumheli/index.php?topic=2405.0 [heli-spb.ru]
Счастлив тот кто не врёт, кто придуманным живёт
Офлайн
#3 Авг. 22, 2012 16:26:33
- root
-
-

- Евгений
- Из: Ставрополь
- Зарегистрирован: 2011-09-27
- Сообщения: 2367
- Репутация:
13
- Профиль Отправить e-mail О себе
Если вы новичёк или как настроить вертолёт!
Юр скокум упустил.
Офлайн
#4 Авг. 22, 2012 16:53:20
- CAMELION
-
-
- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5864
- Репутация:
12
- Профиль Отправить e-mail
Если вы новичёк или как настроить вертолёт!
Точно! Забыл!
Счастлив тот кто не врёт, кто придуманным живёт
Счастлив тот кто не врёт, кто придуманным живёт
Офлайн
#5 Авг. 24, 2012 11:05:47
- CAMELION
-
-
- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5864
- Репутация:
12
- Профиль Отправить e-mail
Если вы новичёк или как настроить вертолёт!
Физические параметры лопастей и их влияние на поведение модели.
Лопасти для вертолета как резина для автомобиля. Мягкие лопасти сглаживают реакции вертолета, делают его более ленивым. Жесткие, напротив, заставляют вертолет реагировать на управление без задержек. Тяжелые лопасти замедляют реакции, легкие обостряют. Лопасти с высоким профилем отбирают больше энергии, а с низким склонны к срыву потока, когда подъемная сила резко снижается. Выбирая лопасти, стоит учесть их параметры и выбрать те, что подойдут вашему стилю и опыту больше всего.
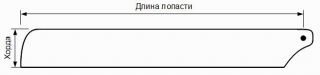
Длина
Когда мы выбираем лопасти, то в первую очередь смотрим на их длину, поскольку длина лопасти зависит от класса вертолета. Чаще под длиной подразумевается расстояние от крепежного отверстия лопасти до ее концевой части. Некоторые немногочисленные производители указывают полную длину лопасти от комля до концевой части. К счастью таких случаев мало.
От длины зависит подъемная сила, и сопротивление вращения которые создает лопасть. Длинная лопасть способна создать большую подъемную силу, но при этом отнимает больше энергии на вращение. С длинными лопастями модель стабильнее при висении и обладает большей “летучестью”, т.е. способна на более крупные маневры и лучше выполняет авторотацию.
Хорда (ширина лопасти)
Важный параметр лопасти, который чаще всего не указывают вовсе, и остается только измерить хорду самостоятельно. Чем шире лопасть, тем больше подъемную силу она может создать при тех же углах атаки и тем резче вертолет при управлении по циклическому шагу. Широкая лопасть имеет более высокое сопротивление вращения и потому сильнее нагружает силовую установку. При использовании лопастей с широкой хордой важна точная работа шагом, иначе можно легко “задушить” мотор. Наибольший разброс ширины встречается у лопастей для вертолетов 50-ого класса и выше.
Материал
Следующее, на что нужно обратить внимание, это материал, из которго сделаны лопасти. Сегодня наиболее распространенные материалы, из которых изготавливают лопасти вертолетов это карбон и стеклопластик. Деревянные лопасти постепенно сходят со сцены, так как не обладают достаточной прочностью и сильно ограничивают вертолет в летных возможностях. К тому же деревянные лопасти склонны к изменению формы, что приводит к постоянному появлению «бабочки». Пожалуй, наименьшее, на что сегодня стоит соглашаться, это стеклопластиковые лопасти. Они не страдают изменением формы, обладают достаточной жесткостью для выполнения легкого 3D и отлично подойдут начинающим вертолетчикам. Пилоты со стажем непременно выберут карбоновые лопасти как наиболее жесткие, позволяющие вертолету выполнять экстремальные фигуры высшего пилотажа и наделяют вертолет молниеносной реакцией на управление.
Вес
Важный параметр - вес лопасти. При прочих равных более тяжелая лопасть сделает вертолет более стабильным, снизит скорость управления по циклическому шагу. Тяжелая лопасть добавит стабильности и размеренности и запасет больше энергии при выполнении авторотации, что сделает маневр более комфортным. Если вы стремитесь к 3D полетам, выбирайте более легкие лопасти.
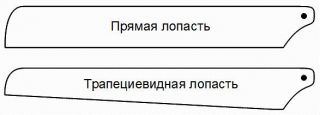
Форма лопасти
Прямая, трапециевидная. Чаще встречается прямая форма, трапециевидная скорее относится к экзотике. Последняя позволяет снизить сопротивление вращения ценой снижения отдачи.
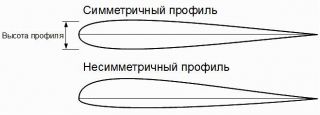
Профиль
Симметричный - высота профиля одинаковая сверху и снизу лопасти. Лопасти с симметричным профилем способны создавать подъемную силу только при ненулевом шаге. Такие лопасти наиболее распространены среди современных вертолетов и используются на всех моделях, выполняющих 3D пилотаж.
Полусимметричный – снизу лопасти профиль имеет меньшую высоту. Такие лопасти способны создавать подъемную силу даже при нулевых углах атаки, т.е. Создают подъемную силу аналогично тому, как это делает крыло самолета. Такие лопасти используются редко, как правило, только на больших копийных вертолетах.
Высота профиля
Чем выше профиль, тем лучше он сопротивляется срыву потока, но тем выше его сопротивление. Деревянные лопасти обычно имеют более высокий профиль, но лишь для того, что бы обладать достаточной прочностью.
Толщина комля
Толщина комля напрямую связана с размером цапф вашего вертолета. Если комель толще, то лопасть не влезет в цапфу, если наоборот – будет болтаться. Обычно в пределах одного класса вертолетов толщина комля стандартна, тем не менее, при покупке лопастей убедитесь, что они подходят к вашему вертолету. Некоторые производители комплектуют лопасти шайбами-проставками, которые можно использовать, если посадочное место цапфы больше толщины комля. Такие шайбы надо устанавливать парами сверху и снизу комля, что бы лопасть была закреплена по центру цапфы.
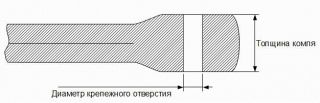
Диаметр крепежного отверстия
Диаметр отверстия должен совпадать с диаметром крепежного винта цапфы. Как и толщина комля, этот параметр стандартный, тем не менее, стоит его проверить перед покупкой лопастей.
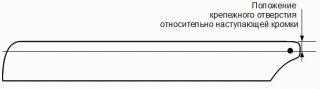
Положение крепежного отверстия относительно наступающей кромки
Определяет то, насколько наступающая кромка лопасти выступает вперед цапфы. Смещенное назад отверстие приводит к тому, что при вращении лопасть отстает от цапфы, что делает такие лопасти более стабильными. Напротив, смещение отверстия к наступающей кромке заставляет лопасть при вращении выдвигаться вперед цапфы, и такое положение делает лопасть менее стабильной.
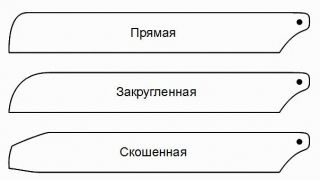
Форма концевой части лопасти
Форма концевой части влияет на сопротивление вращения ротора. Различают прямую, закругленную и скошенную форму. Более прямая форма создает подъемную силу по всей длине лопасть, но и имеет наибольшее сопротивление вращения.
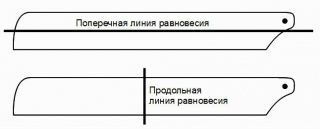
Продольный центр тяжести
Положение центра тяжести в продольном направлении. Чем ближе центр тяжести к концевой части лопасти, тем лопасть более стабильна и лучше выполняет авторотацию. Наоборот, смещение центра тяжести к комлю делает лопасть более маневренной, но страдает накопление лопастью энергии при авторотации.
Поперечный центр тяжести
Положение центра тяжесть поперек лопасти, от наступающей кромки к отступающей. Обычно стараются размещать центр тяжести так, чтобы при вращении лопасть не отставала от цапфы и не выступала вперед. Лопасть с сильно смещенным назад центром тяжести выступает при вращении вперед цапфы и, следовательно, более динамична.
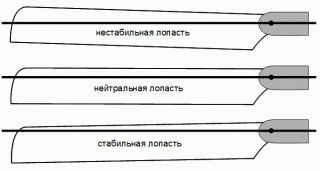
Динамическая балансировка: выступающая/отступающая лопасть
Параметр зависит от положения крепежного отверстия, веса, положения поперечного и продольного центров тяжести. В целом, если лопасть при вращении выступает вперед цапфы, то такая лопасть более маневренная и больше подходит для 3D полетов, но делает вертолет недостаточно стабильным. Если напротив лопасть при вращении отстает от цапфы, то такая лопасть более стабильная. Если лопасть не отстает и не выступает, то это нейтральная лопасть, Такая лопасть наиболее универсальная и одинаково хорошо подходит как для маневров висения и для 3D полетов.
Ночные лопасти
Ночные лопасти со встроенными светодиодами и встроенным, либо съемным аккумулятором служат для комплектации вертолета для ночных полетов. Совместно с лопастями используются различные способы подсветки корпуса вертолета.
Лопасти с защитным стержнем
Стержень не дает лопасти разлетаться на отдельные части в случае падения. Очень полезный элемент безопасности, который к сожалению присутствует только в дорогих лопастях известных производителей. Случается, что обломки лопастей, не оборудованных таким стержнем, разлетаются на расстояние до 10 метров от места падения и могут привести к травме.
Олег Муринский (Aarc)
Источник: blogs
Счастлив тот кто не врёт, кто придуманным живёт
Лопасти для вертолета как резина для автомобиля. Мягкие лопасти сглаживают реакции вертолета, делают его более ленивым. Жесткие, напротив, заставляют вертолет реагировать на управление без задержек. Тяжелые лопасти замедляют реакции, легкие обостряют. Лопасти с высоким профилем отбирают больше энергии, а с низким склонны к срыву потока, когда подъемная сила резко снижается. Выбирая лопасти, стоит учесть их параметры и выбрать те, что подойдут вашему стилю и опыту больше всего.
Длина
Когда мы выбираем лопасти, то в первую очередь смотрим на их длину, поскольку длина лопасти зависит от класса вертолета. Чаще под длиной подразумевается расстояние от крепежного отверстия лопасти до ее концевой части. Некоторые немногочисленные производители указывают полную длину лопасти от комля до концевой части. К счастью таких случаев мало.
От длины зависит подъемная сила, и сопротивление вращения которые создает лопасть. Длинная лопасть способна создать большую подъемную силу, но при этом отнимает больше энергии на вращение. С длинными лопастями модель стабильнее при висении и обладает большей “летучестью”, т.е. способна на более крупные маневры и лучше выполняет авторотацию.
Хорда (ширина лопасти)
Важный параметр лопасти, который чаще всего не указывают вовсе, и остается только измерить хорду самостоятельно. Чем шире лопасть, тем больше подъемную силу она может создать при тех же углах атаки и тем резче вертолет при управлении по циклическому шагу. Широкая лопасть имеет более высокое сопротивление вращения и потому сильнее нагружает силовую установку. При использовании лопастей с широкой хордой важна точная работа шагом, иначе можно легко “задушить” мотор. Наибольший разброс ширины встречается у лопастей для вертолетов 50-ого класса и выше.
Материал
Следующее, на что нужно обратить внимание, это материал, из которго сделаны лопасти. Сегодня наиболее распространенные материалы, из которых изготавливают лопасти вертолетов это карбон и стеклопластик. Деревянные лопасти постепенно сходят со сцены, так как не обладают достаточной прочностью и сильно ограничивают вертолет в летных возможностях. К тому же деревянные лопасти склонны к изменению формы, что приводит к постоянному появлению «бабочки». Пожалуй, наименьшее, на что сегодня стоит соглашаться, это стеклопластиковые лопасти. Они не страдают изменением формы, обладают достаточной жесткостью для выполнения легкого 3D и отлично подойдут начинающим вертолетчикам. Пилоты со стажем непременно выберут карбоновые лопасти как наиболее жесткие, позволяющие вертолету выполнять экстремальные фигуры высшего пилотажа и наделяют вертолет молниеносной реакцией на управление.
Вес
Важный параметр - вес лопасти. При прочих равных более тяжелая лопасть сделает вертолет более стабильным, снизит скорость управления по циклическому шагу. Тяжелая лопасть добавит стабильности и размеренности и запасет больше энергии при выполнении авторотации, что сделает маневр более комфортным. Если вы стремитесь к 3D полетам, выбирайте более легкие лопасти.
Форма лопасти
Прямая, трапециевидная. Чаще встречается прямая форма, трапециевидная скорее относится к экзотике. Последняя позволяет снизить сопротивление вращения ценой снижения отдачи.
Профиль
Симметричный - высота профиля одинаковая сверху и снизу лопасти. Лопасти с симметричным профилем способны создавать подъемную силу только при ненулевом шаге. Такие лопасти наиболее распространены среди современных вертолетов и используются на всех моделях, выполняющих 3D пилотаж.
Полусимметричный – снизу лопасти профиль имеет меньшую высоту. Такие лопасти способны создавать подъемную силу даже при нулевых углах атаки, т.е. Создают подъемную силу аналогично тому, как это делает крыло самолета. Такие лопасти используются редко, как правило, только на больших копийных вертолетах.
Высота профиля
Чем выше профиль, тем лучше он сопротивляется срыву потока, но тем выше его сопротивление. Деревянные лопасти обычно имеют более высокий профиль, но лишь для того, что бы обладать достаточной прочностью.
Толщина комля
Толщина комля напрямую связана с размером цапф вашего вертолета. Если комель толще, то лопасть не влезет в цапфу, если наоборот – будет болтаться. Обычно в пределах одного класса вертолетов толщина комля стандартна, тем не менее, при покупке лопастей убедитесь, что они подходят к вашему вертолету. Некоторые производители комплектуют лопасти шайбами-проставками, которые можно использовать, если посадочное место цапфы больше толщины комля. Такие шайбы надо устанавливать парами сверху и снизу комля, что бы лопасть была закреплена по центру цапфы.
Диаметр крепежного отверстия
Диаметр отверстия должен совпадать с диаметром крепежного винта цапфы. Как и толщина комля, этот параметр стандартный, тем не менее, стоит его проверить перед покупкой лопастей.
Положение крепежного отверстия относительно наступающей кромки
Определяет то, насколько наступающая кромка лопасти выступает вперед цапфы. Смещенное назад отверстие приводит к тому, что при вращении лопасть отстает от цапфы, что делает такие лопасти более стабильными. Напротив, смещение отверстия к наступающей кромке заставляет лопасть при вращении выдвигаться вперед цапфы, и такое положение делает лопасть менее стабильной.
Форма концевой части лопасти
Форма концевой части влияет на сопротивление вращения ротора. Различают прямую, закругленную и скошенную форму. Более прямая форма создает подъемную силу по всей длине лопасть, но и имеет наибольшее сопротивление вращения.
Продольный центр тяжести
Положение центра тяжести в продольном направлении. Чем ближе центр тяжести к концевой части лопасти, тем лопасть более стабильна и лучше выполняет авторотацию. Наоборот, смещение центра тяжести к комлю делает лопасть более маневренной, но страдает накопление лопастью энергии при авторотации.
Поперечный центр тяжести
Положение центра тяжесть поперек лопасти, от наступающей кромки к отступающей. Обычно стараются размещать центр тяжести так, чтобы при вращении лопасть не отставала от цапфы и не выступала вперед. Лопасть с сильно смещенным назад центром тяжести выступает при вращении вперед цапфы и, следовательно, более динамична.
Динамическая балансировка: выступающая/отступающая лопасть
Параметр зависит от положения крепежного отверстия, веса, положения поперечного и продольного центров тяжести. В целом, если лопасть при вращении выступает вперед цапфы, то такая лопасть более маневренная и больше подходит для 3D полетов, но делает вертолет недостаточно стабильным. Если напротив лопасть при вращении отстает от цапфы, то такая лопасть более стабильная. Если лопасть не отстает и не выступает, то это нейтральная лопасть, Такая лопасть наиболее универсальная и одинаково хорошо подходит как для маневров висения и для 3D полетов.
Ночные лопасти
Ночные лопасти со встроенными светодиодами и встроенным, либо съемным аккумулятором служат для комплектации вертолета для ночных полетов. Совместно с лопастями используются различные способы подсветки корпуса вертолета.
Лопасти с защитным стержнем
Стержень не дает лопасти разлетаться на отдельные части в случае падения. Очень полезный элемент безопасности, который к сожалению присутствует только в дорогих лопастях известных производителей. Случается, что обломки лопастей, не оборудованных таким стержнем, разлетаются на расстояние до 10 метров от места падения и могут привести к травме.
Олег Муринский (Aarc)
Источник: blogs
Счастлив тот кто не врёт, кто придуманным живёт
Офлайн
#6 Сен. 13, 2012 11:34:31
- CAMELION
-
-
- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5864
- Репутация:
12
- Профиль Отправить e-mail
Если вы новичёк или как настроить вертолёт!
Калибровка регуляторов Scorpion Commander ESC
Для правильной работы регуляторов Скорпион с Вашим конкретным передатчиком , необходимо откалибровать положение тротл стика!
Для начала убедитесь что эндпоинты канала газа в вашем передатчике установлены в 100 проценнтов (не больше и не меньше) и кривая газа имеет вид диагональной прямой от 0 до 100 процентов
Далее (питание регуля пока выключено) Переведите стик газа в максимальное положение(полный газ) и подсоедините питание к регулятору!(для Вашей безопасности лучше снять лопасти с вертолета)
Примерно через две секунды вы услышите звук “Бип-Бип”, оставляйте стик в максимальном положении до тех пор пока не услышите еще один “Бип”(примерно через 10 сек)
Теперь переведите стик газа в минимальное положение и через пару секунд Вы услышите “Бип-Бип” и еще через секунду “Диии-Дууу” звук, Поздравляю, вы только что откалибровали ваш регулятор!
Взято: http://heli-spb.ru/forumheli/index.php?topic=449.0 [heli-spb.ru]
Счастлив тот кто не врёт, кто придуманным живёт
Для правильной работы регуляторов Скорпион с Вашим конкретным передатчиком , необходимо откалибровать положение тротл стика!
Для начала убедитесь что эндпоинты канала газа в вашем передатчике установлены в 100 проценнтов (не больше и не меньше) и кривая газа имеет вид диагональной прямой от 0 до 100 процентов
Далее (питание регуля пока выключено) Переведите стик газа в максимальное положение(полный газ) и подсоедините питание к регулятору!(для Вашей безопасности лучше снять лопасти с вертолета)
Примерно через две секунды вы услышите звук “Бип-Бип”, оставляйте стик в максимальном положении до тех пор пока не услышите еще один “Бип”(примерно через 10 сек)
Теперь переведите стик газа в минимальное положение и через пару секунд Вы услышите “Бип-Бип” и еще через секунду “Диии-Дууу” звук, Поздравляю, вы только что откалибровали ваш регулятор!
Взято: http://heli-spb.ru/forumheli/index.php?topic=449.0 [heli-spb.ru]
Счастлив тот кто не врёт, кто придуманным живёт
Офлайн
#7 Сен. 24, 2012 00:25:15
- CAMELION
-
-
- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5864
- Репутация:
12
- Профиль Отправить e-mail
Если вы новичёк или как настроить вертолёт!
Может кому пригодится!
Настройка МИКРОБА!
http://www.youtube.com/user/ronlund1953 [youtube.com]
Счастлив тот кто не врёт, кто придуманным живёт
Настройка МИКРОБА!
http://www.youtube.com/user/ronlund1953 [youtube.com]
Счастлив тот кто не врёт, кто придуманным живёт
Офлайн
#8 Ноя. 1, 2012 23:26:10
- CAMELION
-
-
- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5864
- Репутация:
12
- Профиль Отправить e-mail
Если вы новичёк или как настроить вертолёт!
Изучаем начинку сервоприводов и надписи на коробках.
Все мы бывали в подобной ситуации, стояли перед прилавком местного магазинчика товаров для хобби, смотрели на море запчастей и думали, что же выбрать. Обычное дело! Часто выбрать правильную деталь сложнее, чем определиться с цветом вашего нового автомобиля ;-).
Как и остальные комплектующие типа двигателей, лопастей, топлива и радиоаппаратуры, сервоприводы представлены в огромном ассортименте. К счастью есть мы, источники информации и автор-переводчик и сейчас мы поведаем о том, как это море сервоприводов классифицируется, называется, какие конструкции бывают и для чего их придумали. Надеемся это поможет вам разобраться в ваших требованиях и быстро определиться с выбором.
Справедливости ради надо заметить, что рассказ пойдет о обычных сервоприводах для летющих радиоуправляемых моделей.
Начнем с хвоста.
Все сервоприводы для радиоуправляемых моделей используют три провода для работы. Положительный провод для питания, обычно 4.8В или 6В, отрицательный провод и сигнальный провод. Управляющий сигнал передает информацию о требуемом положении выходного вала. Вал связан с потенциометром, который определяет его положение. Контроллер по сопротивлению потенциометра и значению управляющего сигнала определяет, в какую сторону требуется вращать мотор, чтобы получить нужное положение выходного вала. Чем выше напряжение питания сервопривода, тем быстрее он работает и больший момент развивает.
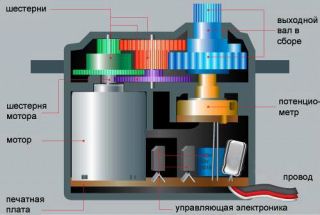
Рулевая машинка (сервопривод)
Управляющий сигнал представляет собой импульсы переменной ширины. Импульсы повторяются с постоянной частотой, которая измеряется в герцах. Большая часть приемников генерирует импульсы с частотой 50Гц. Это означает, что они передают команды о требуемом положении сервопривода 50 раз в секунду. Положение сервопривода определяется шириной импульса. Для типичного сервопривода, используемого в радиоуправляемых моделях, длительность импульса в 1520 мкс означает, что сервопривод должен занять среднее положение. Увеличение или уменьшение длины импульса заставит сервопривод повернуться по часовой или против часовой стрелки соответственно.
Гироскопы используют более высокую частоту импульсов: 250Гц и 333Гц, что позволяет гироскопам чаще передавать команды сервоприводам. Гироскопы GY601/611 используют нестандартную ширину импульса 760мкс. Среднее положение при этом соответствует 760мкс, аналогично тому, как в обычных сервоприводах среднему положению соответствует 1520мкс.
Характеристики сервоприводов:
Размер и вес.
Размеры бывают микро, мини, стандартный и гигант(1/4). В пределах каждого класса размеры могут немного меняться, но в целом указанные группы покрывают 95% встречающихся размеров.
Средние размеры сервоприводов для справки:
Микро: 24мм x 12мм x 24мм, вес: 8-10 г.
Мини: 30мм x 15мм x 35мм, вес 25 г.
Стандарт: 40мм x 20мм x 37мм, вес: 50-60 г.
Скорость.
Скорость сервоприводов измеряется временем поворота качалки сервопривода на угол 60 градусов при напряжении питания 4.8В и 6В. Например, сервопривод с параметром 0.22с/60° при 4.8В поворачивает вал на 60 градусов за 0.22с при напряжении питания 4.8В. Это не так быстро, как может показаться. Наиболее быстрые сервоприводы имеют время перемещения от 0.06 до 0.09с.
Момент.
Момент сервопривода измеряется по весу груза в кг, который сервопривод может удерживать неподвижно на качалке с плечом 1 см. Указывают две цифры, для напряжения питания 4.8В и 6В. Например если указано, что сервопривод развивает 10кг/см, значит, что на качалке длиной 1см сервопривод может развить усилие 10 кг, прежде чем остановится. Для качалки в 2см такой сервопривод сможет развить усилие 5кг, а на 5мм целых 20кг.
Пластиковые, карбонитовые или металлические шестерни?
Как видно из названия, сервоприводы бывают с пластиковыми, карбонитовыми и полностью, либо частично металлическими шестернями или только с металлическим выходным валом. У всех есть свои плюсы и минусы, в зависимости от того где вы будете их использовать.

Шестерни сервоприводов.
Пластиковые шестерни относительно непрочные, зачастую ломаются при падении модели, но ремкомплекты на них недороги, а сами шестерни практически не изнашиваются. Карбонитовые во многом аналогичны пластиковым, немного прочнее последних и чуть более подвержены износу. Металлические шестерни намного прочнее, хорошо противостоят падениям, однако имеют самый дорогой ремкомплект и сильно подвержены износу. Со временем в металлических шестернях появляется люфт и, по-хорошему, их надо полностью менять каждый сезон.
Обычный мотор, мотор без сердечника или бесколлекторный мотор?
Обычный мотор это мотор постоянного тока, который имеет наборный железный сердечник, разделенный на секции, на которые наложены витки обмотки. Сердечник, обмотки и коллектор образуют якорь. По бокам якоря расположены постоянные магниты. Сердечник бывает с 3-мя и 5-ю полюсами. Пять полюсов дают более высокий момент и плавность хода. Тяжелый якорь мешает мотору быстро набирать обороты и быстро останавливаться, а во время вращения якорь совершает колебания каждый раз как очередная секция сердечника проходит мимо магнита. Все это делает работу сервопривода с таким мотором дерганой и неточной.

Моторы без сердечника, напротив, имеют единственный неподвижный магнит в центре и вращающуюся обмотку, которая оформлена в виде цилиндра или стакана и окружает магнит. Такая конструкция легче, не имеет секций и в результате более динамична и работает без рывков. Естественно, моторы без сердечника дороже, но дают более высокую точность, момент и скорость по сравнению со стандартными моторами.
Сервоприводы с бесколлекторным мотором появились сравнительно недавно и первоначально выпускались только компанией Futaba, но появляются бесколлекторные сервоприводы и других производителей, например MKS и Outrage. Преимущества те же что и у остальных бесколлекторных моторов: нет щеток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Недостаток - цена выше на 50-70%.
Цифровые или аналоговые?
Что бы определиться какие лучше, давайте рассмотрим принцип работы тех и других и выбор станет очевиден. Но для начала отметим, что цифровые и аналоговые сервоприводы механически не отличаются друг от друга. У них те же корпуса, моторы, шестеренки и даже потенциометры. Все дело в способе управления мотором!
Работа аналогового сервопривода.
Сервоприводы управляют мотором с помощью импульсов напряжения, подаваемых на мотор. Напряжение при этом постоянно и равно напряжению питания приемника (4.8 - 6В). Частота импульсов стандартна - 50Гц. Чем длиннее импульс, тем быстрее вращается мотор и больший момент развивает. Точно так же работает большинство регуляторов моторов. Подобное поведение можно получит включая и выключая бытовой вентилятор. Чем реже включаем тем медленнее вращается, а чем чаще и дольше держим включение - тем быстрее.
Возвращаемся к сервоприводу. В покое на мотор не подается напряжение, а если лишь слегка отклонить стик передатчика, то на мотор пойдет короткий импульс напряжения. Чем больше перемещение стика тем шире импульс питания для мотора, и тем быстрее сервопривод двигается в нужное положение. Важно, что на малых перемещениях на мотор подаются короткие импульсы малой мощности, т.е. если стик или внешняя сила медленно сдвигает вал с места, сначала на мотор подаются слабые сигналы и чем сильнее отклоняется стик или дальше смещается вал от точки удержания, тем более мощные импульсы питания посылаются на мотор.
Как вы понимаете, короткие слабые импульсы не могут заставить мотор вращаться быстро и развивать высокий момент. В этом и состоит проблема всех аналоговых сервоприводов: они медленно и слабо реагируют на малые команды управления или когда внешняя сила сдвигает их с места. Зона низкой скорости и момента называется мертвая зона (deadband).
Впрочем, все это не так страшно пока вертолетом управляет обычный человек, но когда за дело берется гироскоп, система стабилизации или топ-пилот с реакцией мангуста, аналоговые сервоприводы становятся проблемой.
Работа цифрового сервопривода.
Спасение в цифровых сервоприводах! Как говорилось ранее, аналоговые и цифровые сервоприводы сделаны из одних деталей и даже трехжильный провод для управления тот же. Вся разница в том, как управляющие импульсы посылаются на мотор.
Миниатюрный микроконтроллер анализирует сигнал поступающий с приемника и преобразует его в высокочастотные импульсы управления мотором. В отличии от аналоговых сервоприводов где мотор получает управляющие импульсы 50 раз в секунду, мотор цифрового сервопривода получает таких сигналов более 300 в секунду. Само собой, импульсы будут короче, но при таком их количестве сервопривод и ускоряется быстрее и создает постоянный высокий момент. Вы наверняка обращали внимание на “пение” цифровых сервоприводов под нагрузкой - это слышны короткие частые управляющие импульсы, посылаемые на мотор.
В результате мы получаем сервопривод который имеет намного меньшую мертвую зону, быстрый отклик, быстрый и плавный набор скорости и отличное удержание.
Все здорово, но все эти ускорения и моменты имеют один маленький недостаток - энергопотребление! Да-да, цифровые сервоприводы охотно потребляют энергию бортового аккумулятора, их достоинства надо кормить. Вы можете совершенно справедливо заметить, что при нынешнем развитии аккумуляторных технологий дополнительное энергопотребление не такая уж проблема. Это так, но убедитесь, что в случае использования встроенного в регулятор линейного BEC, его мощности достаточно для питания постоянно отрабатывающих цифровых сервоприводов! Оптимально в таких случаях использовать внешний или встроенный импульсный BEC.
И так, цифровые сервоприводы намного лучше аналоговых. Конечно, вы по-прежнему можете летать на аналоговых, но однажды попробовав цифровые, вряд ли вернетесь назад. И под конец сравнения обратим внимание еще на один момент: в спецификациях аналоговых сервоприводов зачастую указаны цифры скорости и момента выше чем у некоторых цифровых, но вы же помните что аналоговые приводы имеют меньшую скорость и момент на коротких и малых перемещениях. Красивые цифры даны для максимального отклонения стика, когда сервопривод работает на полную мощность. Даже с меньшими значениями характеристик цифровые сервоприводы все равно будут работать лучше на малых перемещениях, когда скорость и момент особенно важны.
Подшипники качения или подшипники скольжения?
Выходной вал проходит через корпус сервопривода и в месте выхода вал поддерживается либо шарикоподшипником, либо пластиковой втулкой.

Подшипники сервоприводов.
Как и прочие вращающиеся механизмы, сервоприводы работают более плавно и точно если в них используются подшипники качения. Такие сервоприводы менее подвержены износу чем сервоприводы с втулкой, поскольку втулка неизбежно изнашивается и появляется люфт между корпусом и выходным валом. Желательно везде использовать сервоприводы с подшипниками качения, хотя они и несколько дороже.
Скорость или момент?
В большинстве случаев предпочтительны более мощные и быстрые сервоприводы. Однако скоростные сервоприводы хороши когда пилот успевает реагировать на резкое поведение вертолета или когда высокая скорость требуется для правильной работы модели.
Многие пилоты не осознают, что сервоприводы могут быть слишком быстрыми для их уровня подготовки и рефлексов и могут сделать вертолет сложным в управлении. Быстрые сервоприводы необходимы для управления хвостом вертолета, тогда как для управления циклическим и коллективным шагом требуется высокий момент, который позволяет сервоприводу держать положение и быстро возвращаться в центр, что особенно важно при выполнении 3D маневров.
Немного о тюнинге.
Рекомендуется смазать место выхода вала из корпуса сервопривода густой смазкой, а место выхода провода герметиком, чтобы защитить начинку от попадания воды и топлива. Впрочем, это дело вкуса.
Идеальный сервопривод.
Существует ли такой? Зависти от того, кого вы спросите и от того, где сервопривод применяется. Отличный сервопривод должен работать так быстро как вам надо, давать большой момент, хорошо держать положение и при этом быть дешевым. Похоже, такого еще не изобрели. Каждый производитель ищет баланс характеристик и рекламирует свой товар, поэтому выбирайте мудро. Во многом выбор сервопривода зависит от опыта применения и ваших личных потребностей. В конечном итоге не столь важны цифры на коробке и хорошая цена, сколько важно, что бы сервопривод делал свою работу и позволял вам летать!
Для справки:
Часто английские и американские производители и интернет-магазины используют английские единицы измерения при указании характеристик сервоприводов. Для нас привычнее единицы СИ. Для перевода можно воспользоваться данными ниже:
Для перевода момента из унций на дюйм (oz/in) в килограммы на сантиметр (kg/cm), разделите исходное значение на 13.89.
1 унция (oz) = 28.35 грамма (g)
1 дюйм (in) = 2.54 сантиметра (cm)
При составлении статьи использовались материалы с сайтов:
RCHelimag.com, www.rchelicopterfun.com, futaba.com, helidirect.com
Автор: Oleg на 0:39
Счастлив тот кто не врёт, кто придуманным живёт
Все мы бывали в подобной ситуации, стояли перед прилавком местного магазинчика товаров для хобби, смотрели на море запчастей и думали, что же выбрать. Обычное дело! Часто выбрать правильную деталь сложнее, чем определиться с цветом вашего нового автомобиля ;-).
Как и остальные комплектующие типа двигателей, лопастей, топлива и радиоаппаратуры, сервоприводы представлены в огромном ассортименте. К счастью есть мы, источники информации и автор-переводчик и сейчас мы поведаем о том, как это море сервоприводов классифицируется, называется, какие конструкции бывают и для чего их придумали. Надеемся это поможет вам разобраться в ваших требованиях и быстро определиться с выбором.
Справедливости ради надо заметить, что рассказ пойдет о обычных сервоприводах для летющих радиоуправляемых моделей.
Начнем с хвоста.
Все сервоприводы для радиоуправляемых моделей используют три провода для работы. Положительный провод для питания, обычно 4.8В или 6В, отрицательный провод и сигнальный провод. Управляющий сигнал передает информацию о требуемом положении выходного вала. Вал связан с потенциометром, который определяет его положение. Контроллер по сопротивлению потенциометра и значению управляющего сигнала определяет, в какую сторону требуется вращать мотор, чтобы получить нужное положение выходного вала. Чем выше напряжение питания сервопривода, тем быстрее он работает и больший момент развивает.
Рулевая машинка (сервопривод)
Управляющий сигнал представляет собой импульсы переменной ширины. Импульсы повторяются с постоянной частотой, которая измеряется в герцах. Большая часть приемников генерирует импульсы с частотой 50Гц. Это означает, что они передают команды о требуемом положении сервопривода 50 раз в секунду. Положение сервопривода определяется шириной импульса. Для типичного сервопривода, используемого в радиоуправляемых моделях, длительность импульса в 1520 мкс означает, что сервопривод должен занять среднее положение. Увеличение или уменьшение длины импульса заставит сервопривод повернуться по часовой или против часовой стрелки соответственно.
Гироскопы используют более высокую частоту импульсов: 250Гц и 333Гц, что позволяет гироскопам чаще передавать команды сервоприводам. Гироскопы GY601/611 используют нестандартную ширину импульса 760мкс. Среднее положение при этом соответствует 760мкс, аналогично тому, как в обычных сервоприводах среднему положению соответствует 1520мкс.
Характеристики сервоприводов:
Размер и вес.
Размеры бывают микро, мини, стандартный и гигант(1/4). В пределах каждого класса размеры могут немного меняться, но в целом указанные группы покрывают 95% встречающихся размеров.
Средние размеры сервоприводов для справки:
Микро: 24мм x 12мм x 24мм, вес: 8-10 г.
Мини: 30мм x 15мм x 35мм, вес 25 г.
Стандарт: 40мм x 20мм x 37мм, вес: 50-60 г.
Скорость.
Скорость сервоприводов измеряется временем поворота качалки сервопривода на угол 60 градусов при напряжении питания 4.8В и 6В. Например, сервопривод с параметром 0.22с/60° при 4.8В поворачивает вал на 60 градусов за 0.22с при напряжении питания 4.8В. Это не так быстро, как может показаться. Наиболее быстрые сервоприводы имеют время перемещения от 0.06 до 0.09с.
Момент.
Момент сервопривода измеряется по весу груза в кг, который сервопривод может удерживать неподвижно на качалке с плечом 1 см. Указывают две цифры, для напряжения питания 4.8В и 6В. Например если указано, что сервопривод развивает 10кг/см, значит, что на качалке длиной 1см сервопривод может развить усилие 10 кг, прежде чем остановится. Для качалки в 2см такой сервопривод сможет развить усилие 5кг, а на 5мм целых 20кг.
Пластиковые, карбонитовые или металлические шестерни?
Как видно из названия, сервоприводы бывают с пластиковыми, карбонитовыми и полностью, либо частично металлическими шестернями или только с металлическим выходным валом. У всех есть свои плюсы и минусы, в зависимости от того где вы будете их использовать.
Шестерни сервоприводов.
Пластиковые шестерни относительно непрочные, зачастую ломаются при падении модели, но ремкомплекты на них недороги, а сами шестерни практически не изнашиваются. Карбонитовые во многом аналогичны пластиковым, немного прочнее последних и чуть более подвержены износу. Металлические шестерни намного прочнее, хорошо противостоят падениям, однако имеют самый дорогой ремкомплект и сильно подвержены износу. Со временем в металлических шестернях появляется люфт и, по-хорошему, их надо полностью менять каждый сезон.
Обычный мотор, мотор без сердечника или бесколлекторный мотор?
Обычный мотор это мотор постоянного тока, который имеет наборный железный сердечник, разделенный на секции, на которые наложены витки обмотки. Сердечник, обмотки и коллектор образуют якорь. По бокам якоря расположены постоянные магниты. Сердечник бывает с 3-мя и 5-ю полюсами. Пять полюсов дают более высокий момент и плавность хода. Тяжелый якорь мешает мотору быстро набирать обороты и быстро останавливаться, а во время вращения якорь совершает колебания каждый раз как очередная секция сердечника проходит мимо магнита. Все это делает работу сервопривода с таким мотором дерганой и неточной.
Моторы без сердечника, напротив, имеют единственный неподвижный магнит в центре и вращающуюся обмотку, которая оформлена в виде цилиндра или стакана и окружает магнит. Такая конструкция легче, не имеет секций и в результате более динамична и работает без рывков. Естественно, моторы без сердечника дороже, но дают более высокую точность, момент и скорость по сравнению со стандартными моторами.
Сервоприводы с бесколлекторным мотором появились сравнительно недавно и первоначально выпускались только компанией Futaba, но появляются бесколлекторные сервоприводы и других производителей, например MKS и Outrage. Преимущества те же что и у остальных бесколлекторных моторов: нет щеток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Недостаток - цена выше на 50-70%.
Цифровые или аналоговые?
Что бы определиться какие лучше, давайте рассмотрим принцип работы тех и других и выбор станет очевиден. Но для начала отметим, что цифровые и аналоговые сервоприводы механически не отличаются друг от друга. У них те же корпуса, моторы, шестеренки и даже потенциометры. Все дело в способе управления мотором!
Работа аналогового сервопривода.
Сервоприводы управляют мотором с помощью импульсов напряжения, подаваемых на мотор. Напряжение при этом постоянно и равно напряжению питания приемника (4.8 - 6В). Частота импульсов стандартна - 50Гц. Чем длиннее импульс, тем быстрее вращается мотор и больший момент развивает. Точно так же работает большинство регуляторов моторов. Подобное поведение можно получит включая и выключая бытовой вентилятор. Чем реже включаем тем медленнее вращается, а чем чаще и дольше держим включение - тем быстрее.
Возвращаемся к сервоприводу. В покое на мотор не подается напряжение, а если лишь слегка отклонить стик передатчика, то на мотор пойдет короткий импульс напряжения. Чем больше перемещение стика тем шире импульс питания для мотора, и тем быстрее сервопривод двигается в нужное положение. Важно, что на малых перемещениях на мотор подаются короткие импульсы малой мощности, т.е. если стик или внешняя сила медленно сдвигает вал с места, сначала на мотор подаются слабые сигналы и чем сильнее отклоняется стик или дальше смещается вал от точки удержания, тем более мощные импульсы питания посылаются на мотор.
Как вы понимаете, короткие слабые импульсы не могут заставить мотор вращаться быстро и развивать высокий момент. В этом и состоит проблема всех аналоговых сервоприводов: они медленно и слабо реагируют на малые команды управления или когда внешняя сила сдвигает их с места. Зона низкой скорости и момента называется мертвая зона (deadband).
Впрочем, все это не так страшно пока вертолетом управляет обычный человек, но когда за дело берется гироскоп, система стабилизации или топ-пилот с реакцией мангуста, аналоговые сервоприводы становятся проблемой.
Работа цифрового сервопривода.
Спасение в цифровых сервоприводах! Как говорилось ранее, аналоговые и цифровые сервоприводы сделаны из одних деталей и даже трехжильный провод для управления тот же. Вся разница в том, как управляющие импульсы посылаются на мотор.
Миниатюрный микроконтроллер анализирует сигнал поступающий с приемника и преобразует его в высокочастотные импульсы управления мотором. В отличии от аналоговых сервоприводов где мотор получает управляющие импульсы 50 раз в секунду, мотор цифрового сервопривода получает таких сигналов более 300 в секунду. Само собой, импульсы будут короче, но при таком их количестве сервопривод и ускоряется быстрее и создает постоянный высокий момент. Вы наверняка обращали внимание на “пение” цифровых сервоприводов под нагрузкой - это слышны короткие частые управляющие импульсы, посылаемые на мотор.
В результате мы получаем сервопривод который имеет намного меньшую мертвую зону, быстрый отклик, быстрый и плавный набор скорости и отличное удержание.
Все здорово, но все эти ускорения и моменты имеют один маленький недостаток - энергопотребление! Да-да, цифровые сервоприводы охотно потребляют энергию бортового аккумулятора, их достоинства надо кормить. Вы можете совершенно справедливо заметить, что при нынешнем развитии аккумуляторных технологий дополнительное энергопотребление не такая уж проблема. Это так, но убедитесь, что в случае использования встроенного в регулятор линейного BEC, его мощности достаточно для питания постоянно отрабатывающих цифровых сервоприводов! Оптимально в таких случаях использовать внешний или встроенный импульсный BEC.
И так, цифровые сервоприводы намного лучше аналоговых. Конечно, вы по-прежнему можете летать на аналоговых, но однажды попробовав цифровые, вряд ли вернетесь назад. И под конец сравнения обратим внимание еще на один момент: в спецификациях аналоговых сервоприводов зачастую указаны цифры скорости и момента выше чем у некоторых цифровых, но вы же помните что аналоговые приводы имеют меньшую скорость и момент на коротких и малых перемещениях. Красивые цифры даны для максимального отклонения стика, когда сервопривод работает на полную мощность. Даже с меньшими значениями характеристик цифровые сервоприводы все равно будут работать лучше на малых перемещениях, когда скорость и момент особенно важны.
Подшипники качения или подшипники скольжения?
Выходной вал проходит через корпус сервопривода и в месте выхода вал поддерживается либо шарикоподшипником, либо пластиковой втулкой.
Подшипники сервоприводов.
Как и прочие вращающиеся механизмы, сервоприводы работают более плавно и точно если в них используются подшипники качения. Такие сервоприводы менее подвержены износу чем сервоприводы с втулкой, поскольку втулка неизбежно изнашивается и появляется люфт между корпусом и выходным валом. Желательно везде использовать сервоприводы с подшипниками качения, хотя они и несколько дороже.
Скорость или момент?
В большинстве случаев предпочтительны более мощные и быстрые сервоприводы. Однако скоростные сервоприводы хороши когда пилот успевает реагировать на резкое поведение вертолета или когда высокая скорость требуется для правильной работы модели.
Многие пилоты не осознают, что сервоприводы могут быть слишком быстрыми для их уровня подготовки и рефлексов и могут сделать вертолет сложным в управлении. Быстрые сервоприводы необходимы для управления хвостом вертолета, тогда как для управления циклическим и коллективным шагом требуется высокий момент, который позволяет сервоприводу держать положение и быстро возвращаться в центр, что особенно важно при выполнении 3D маневров.
Немного о тюнинге.
Рекомендуется смазать место выхода вала из корпуса сервопривода густой смазкой, а место выхода провода герметиком, чтобы защитить начинку от попадания воды и топлива. Впрочем, это дело вкуса.
Идеальный сервопривод.
Существует ли такой? Зависти от того, кого вы спросите и от того, где сервопривод применяется. Отличный сервопривод должен работать так быстро как вам надо, давать большой момент, хорошо держать положение и при этом быть дешевым. Похоже, такого еще не изобрели. Каждый производитель ищет баланс характеристик и рекламирует свой товар, поэтому выбирайте мудро. Во многом выбор сервопривода зависит от опыта применения и ваших личных потребностей. В конечном итоге не столь важны цифры на коробке и хорошая цена, сколько важно, что бы сервопривод делал свою работу и позволял вам летать!
Для справки:
Часто английские и американские производители и интернет-магазины используют английские единицы измерения при указании характеристик сервоприводов. Для нас привычнее единицы СИ. Для перевода можно воспользоваться данными ниже:
Для перевода момента из унций на дюйм (oz/in) в килограммы на сантиметр (kg/cm), разделите исходное значение на 13.89.
1 унция (oz) = 28.35 грамма (g)
1 дюйм (in) = 2.54 сантиметра (cm)
При составлении статьи использовались материалы с сайтов:
RCHelimag.com, www.rchelicopterfun.com, futaba.com, helidirect.com
Автор: Oleg на 0:39
Счастлив тот кто не врёт, кто придуманным живёт
Офлайн
#9 Ноя. 1, 2012 23:35:03
- CAMELION
-
-
- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5864
- Репутация:
12
- Профиль Отправить e-mail
Если вы новичёк или как настроить вертолёт!
Подбор оборотов основного ротора.
Размышляя на тему желаемых оборотов основного ротора для тех моделей, которых у меня нет, подумал, что совсем несложно построить линейный график зависимости оборотов основного ротора от размера лопасти. Используя обороты двух разных моделей, функция позволит прикинуть для других размеров лопастей такие обороты, которые, по идее, должны дать схожую динамику.
Функция линейная, на практике же динамика зависит не только от оборотов и длины лопасти, но и от других характеристик лопасти. Тем не менее, функция дает весьма реалистичные результаты при правильном подборе исходных сочетаний длины-оборотов. Калькулятор размещен на Google Docs, ссылка в конце сообщения.
Как это работает:
Например, я летаю на вертолете 450-ого класса при 3000 об/мин и на вертолете 500-ого класса при 2700 об/мин. Мне нравится динамика полета с этими оборотами и мне интересно, какие обороты мне выбрать для вертолета с лопастями 620мм, чтобы динамика была сравнимая. Указываю в таблице 325мм - 3000 об/мин и 425мм - 2700 об/мин.
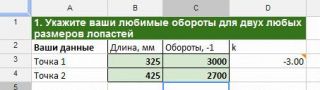
Смотрю на результат: для лопастей 620мм получается около 2100 об/мин. Именно с такими оборотами я и летаю

Другой пример: давайте посмотрим, с какими оборотами летают топ-пилоты. Допустим, 325мм - 3200 об/мин, а 690мм - 2200 об/мин. Для 620мм в этом случае получается около 2400об/мин. Внушительные обороты, но именно на такие, к примеру, рассчитвался MA Furion 6. Близкие обороты заявлены для Trex 600 Pro.
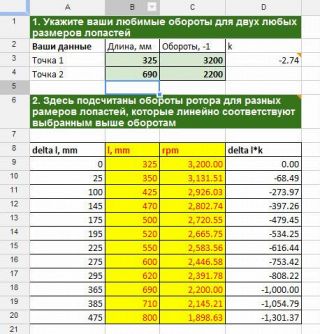
Теперь можете попробовать сами. Держите коэффициент k в диапазоне 2.5-3.0. Хорошо сбалансированные обороты получаюься при k = 2.73 или 325мм - 3000 об/мин и 710мм - 1950 об/мин.
Пожалуйста, будьте аккуратны с файлом, он полностью доступен для редактирования.
Ссылка на калькулятор (Google Docs) https://docs.google.com/spreadsheet/ccc?key=0AqAednr-kINidHdhU1ppZWJleG9taVJrZWVZVVJVU0E#gid=0 [docs.google.com]
Автор: Oleg на 14:04
Счастлив тот кто не врёт, кто придуманным живёт
Размышляя на тему желаемых оборотов основного ротора для тех моделей, которых у меня нет, подумал, что совсем несложно построить линейный график зависимости оборотов основного ротора от размера лопасти. Используя обороты двух разных моделей, функция позволит прикинуть для других размеров лопастей такие обороты, которые, по идее, должны дать схожую динамику.
Функция линейная, на практике же динамика зависит не только от оборотов и длины лопасти, но и от других характеристик лопасти. Тем не менее, функция дает весьма реалистичные результаты при правильном подборе исходных сочетаний длины-оборотов. Калькулятор размещен на Google Docs, ссылка в конце сообщения.
Как это работает:
Например, я летаю на вертолете 450-ого класса при 3000 об/мин и на вертолете 500-ого класса при 2700 об/мин. Мне нравится динамика полета с этими оборотами и мне интересно, какие обороты мне выбрать для вертолета с лопастями 620мм, чтобы динамика была сравнимая. Указываю в таблице 325мм - 3000 об/мин и 425мм - 2700 об/мин.
Смотрю на результат: для лопастей 620мм получается около 2100 об/мин. Именно с такими оборотами я и летаю
Другой пример: давайте посмотрим, с какими оборотами летают топ-пилоты. Допустим, 325мм - 3200 об/мин, а 690мм - 2200 об/мин. Для 620мм в этом случае получается около 2400об/мин. Внушительные обороты, но именно на такие, к примеру, рассчитвался MA Furion 6. Близкие обороты заявлены для Trex 600 Pro.
Теперь можете попробовать сами. Держите коэффициент k в диапазоне 2.5-3.0. Хорошо сбалансированные обороты получаюься при k = 2.73 или 325мм - 3000 об/мин и 710мм - 1950 об/мин.
Пожалуйста, будьте аккуратны с файлом, он полностью доступен для редактирования.
Ссылка на калькулятор (Google Docs) https://docs.google.com/spreadsheet/ccc?key=0AqAednr-kINidHdhU1ppZWJleG9taVJrZWVZVVJVU0E#gid=0 [docs.google.com]
Автор: Oleg на 14:04
Счастлив тот кто не врёт, кто придуманным живёт
Отредактировано CAMELION (Ноя. 1, 2012 23:35:47)
Офлайн
#10 Ноя. 3, 2012 23:09:28
- CAMELION
-
-
- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5864
- Репутация:
12
- Профиль Отправить e-mail
Если вы новичёк или как настроить вертолёт!
Используем симулятор по назначению.
Идея этой заметки окончательно укрепилась после прочтения темы “Симулятор или реал?”, поднятой пользователем с ником AlexSR на heli-spb.ru. Справедливости ради стоит заметить, что написать про использование симулятора стоило и раньше, но я откладывал эту тему до более сложных упражнений, где без симулятора обойтись достаточно сложно.
Что может дать симулятор.
Мой учитель в автошколе говорил “Не бойтесь, пока они учатся. Бойтесь, когда немного научились”. Очень справедливое замечание. Как только стало немного получаться, уже хочется полихачить: ехать быстрее, лететь выше. Но это не наш метод, правда? “Зажечь” можно будет позже, когда в нашем распоряжении будет прочная база. Если хочется драйва уже сейчас, можно поэкспериментировать в симуляторе. И по рукам никто не ударит, и ремонтировать вертолет не придется. Согласитесь, летный день без вертолета это уже совсем грустно, а в симуляторе всегда есть еще одна попытка, за которую не надо платить.
Следующее. По мере продвижения вперед, сложность обучения будет возрастать, и не всякий маневр можно будет дать с нуля на реальной модели. Тут симулятор будет хорошим помощником при первых попытках выполнить новую фигуру или освоить новую ориентацию. Симулятор поможет увидеть и исправить первые ошибки, позволит набить руку. При переходе на реальную модель у вас уже будет представление о том, чего ждать и куда рулить. Обратите внимание, после симулятора у вас будет лишь представление о фигуре, а не отработанный навык. Причина в том, что ощущения пилота в симуляторе и реале отличаются. В реальном полете присутствуют страх и адреналин от которых дрожат руки, ветер, из-за которого модель «дышит», яркое небо, на фоне которого вертолет часто превращается в плоский силуэт и масса других раздражителей. Поведение модели в симуляторе и реальности тоже отличается, сколько ни настраивай виртуальную модель – различия останутся. Поэтому, при переносе нового материала из симулятора на реальную модель, ведите себя так, как будто выполняете маневр в первый раз – пробуйте маневр повыше и подальше от себя, держите в голове контраварийный выход. Другими словами, будьте осторожны.
Далее. К примеру, вы уже неплохо владеете какой-либо ориентацией или умеете выполнять какую-либо фигуру, но все равно остались положения, в которых вы испытываете затруднение или элементы фигуры, в которых повторяется ошибка. Тут симулятор будет незаменимым помощником, позволит продолжать тренировки в те дни, когда у вас нет возможности выехать на летное поле. Продолжайте работать в симуляторе и в следующий раз на поле вы непременно заметите, что фигура стала получаться лучше.
Итак, симулятор позволяет:
выплеснуть эмоции, поэкспериментировать с моделью.
безопасно начать отрабатывать новый материал.
продолжать тренироваться и отрабатывать технику в то время, когда реальные полеты не доступны.
сэкономить. Cимулятор по стоимости сопоставим с ценой одного ремонта вертолет после хорошего падения, а платите вы за симулятор один раз.
Моменты, которых стоит остерегаться при использовании симулятора.
Старайтесь избегать продолжительных занятий в симуляторе. Следуйте хорошему правилу “Мало за день - много за неделю”. 30-60 минут в день вполне достаточно.
Во время занятий на симуляторе старайтесь придерживаться намеченного плана тренировок. Бездумная болтанка в воздухе дает мало пользы. Лучше отработать то, что в реальности пока получается неважно, тогда результат ваших усилий будет наиболее заметен.
Старайтесь не забегать далеко вперед, занимаясь с новым материалом на симуляторе. Учитывайте ваши навыки на реальной модели. Если в реале вы отрабатываете висение боками к себе, в симуляторе вполне можно уже отработать висение кабиной к себе и начинать летать круги и восьмерки. Опять же помните, что более сложные навыки основаны на простых, и лучше закрепить базу, чем плохо освоить что-то новое.
Старайтесь не задерживаться с переносом новых навыков в реальность. Тут, разумеется, надо трезво оценивать ваши силы, но и не бояться нового сверх меры. Разделите для себя новый маневр на положения, где вы уже летали в реальности и хорошо контролируете модель и положения, где вы еще не летали, т.е. испытываете неуверенность. Начните маневр с ведения модели в зоне уверенного контроля, немного зайдите в зону неуверенности и сразу выйдете из маневра. С ростом навыка зона неуверенности будет сужаться, и вы сможете наступать на нее все больше и больше. Например, отработка полета по кругу по часовой стрелке. Проблемное положение – выход модели кабиной на пилота от положения двенадцать часов до положения шесть часов. Начните отработку с пролета половины круга от шести часов до двенадцати, затем прервите выполнение, поверните модель хвостом к себе и верните ее в исходное положение. Далее начните круг с пяти часов и доведите до часа, затем снова верните модель в исходное положение. Задержитесь на этом разрыве и добейтесь более уверенного контроля модели на краях проблемной зоны. Затем отработайте круг с разрывом от двух до четырех часов и так далее, пока круг не замкнется.
Вилка “правильного” в вертолетном деле может быть достаточно широкой. Например, есть вполне конкретные правила балансировки и установки лопастей, которые обязательно надо выполнять, а есть индивидуальные предпочтения, например, пресловутую кривую газа каждый настраивает так, как считает удобным для себя. Использование симулятора это тоже вопрос индивидуальный. Наверняка, есть люди, которые «на дух» не переносят симуляторы, но готовы упорно заниматься на реальной модели. Найдутся и те, кто предпочтет симулятор, перенося в реальность только отточенные до совершенства маневры. В любом случае – пробуйте, ищите тот подход, который подойдет вам больше всего, главное, чтоб это нравилось и развивало навык управления реальной моделью.
Успешных тренировок!
Автор: Oleg http://onheli.blogspot.ru/2010/04/use-sim-right.html#more [onheli.blogspot.ru]
Счастлив тот кто не врёт, кто придуманным живёт
Идея этой заметки окончательно укрепилась после прочтения темы “Симулятор или реал?”, поднятой пользователем с ником AlexSR на heli-spb.ru. Справедливости ради стоит заметить, что написать про использование симулятора стоило и раньше, но я откладывал эту тему до более сложных упражнений, где без симулятора обойтись достаточно сложно.
Что может дать симулятор.
Мой учитель в автошколе говорил “Не бойтесь, пока они учатся. Бойтесь, когда немного научились”. Очень справедливое замечание. Как только стало немного получаться, уже хочется полихачить: ехать быстрее, лететь выше. Но это не наш метод, правда? “Зажечь” можно будет позже, когда в нашем распоряжении будет прочная база. Если хочется драйва уже сейчас, можно поэкспериментировать в симуляторе. И по рукам никто не ударит, и ремонтировать вертолет не придется. Согласитесь, летный день без вертолета это уже совсем грустно, а в симуляторе всегда есть еще одна попытка, за которую не надо платить.
Следующее. По мере продвижения вперед, сложность обучения будет возрастать, и не всякий маневр можно будет дать с нуля на реальной модели. Тут симулятор будет хорошим помощником при первых попытках выполнить новую фигуру или освоить новую ориентацию. Симулятор поможет увидеть и исправить первые ошибки, позволит набить руку. При переходе на реальную модель у вас уже будет представление о том, чего ждать и куда рулить. Обратите внимание, после симулятора у вас будет лишь представление о фигуре, а не отработанный навык. Причина в том, что ощущения пилота в симуляторе и реале отличаются. В реальном полете присутствуют страх и адреналин от которых дрожат руки, ветер, из-за которого модель «дышит», яркое небо, на фоне которого вертолет часто превращается в плоский силуэт и масса других раздражителей. Поведение модели в симуляторе и реальности тоже отличается, сколько ни настраивай виртуальную модель – различия останутся. Поэтому, при переносе нового материала из симулятора на реальную модель, ведите себя так, как будто выполняете маневр в первый раз – пробуйте маневр повыше и подальше от себя, держите в голове контраварийный выход. Другими словами, будьте осторожны.
Далее. К примеру, вы уже неплохо владеете какой-либо ориентацией или умеете выполнять какую-либо фигуру, но все равно остались положения, в которых вы испытываете затруднение или элементы фигуры, в которых повторяется ошибка. Тут симулятор будет незаменимым помощником, позволит продолжать тренировки в те дни, когда у вас нет возможности выехать на летное поле. Продолжайте работать в симуляторе и в следующий раз на поле вы непременно заметите, что фигура стала получаться лучше.
Итак, симулятор позволяет:
выплеснуть эмоции, поэкспериментировать с моделью.
безопасно начать отрабатывать новый материал.
продолжать тренироваться и отрабатывать технику в то время, когда реальные полеты не доступны.
сэкономить. Cимулятор по стоимости сопоставим с ценой одного ремонта вертолет после хорошего падения, а платите вы за симулятор один раз.
Моменты, которых стоит остерегаться при использовании симулятора.
Старайтесь избегать продолжительных занятий в симуляторе. Следуйте хорошему правилу “Мало за день - много за неделю”. 30-60 минут в день вполне достаточно.
Во время занятий на симуляторе старайтесь придерживаться намеченного плана тренировок. Бездумная болтанка в воздухе дает мало пользы. Лучше отработать то, что в реальности пока получается неважно, тогда результат ваших усилий будет наиболее заметен.
Старайтесь не забегать далеко вперед, занимаясь с новым материалом на симуляторе. Учитывайте ваши навыки на реальной модели. Если в реале вы отрабатываете висение боками к себе, в симуляторе вполне можно уже отработать висение кабиной к себе и начинать летать круги и восьмерки. Опять же помните, что более сложные навыки основаны на простых, и лучше закрепить базу, чем плохо освоить что-то новое.
Старайтесь не задерживаться с переносом новых навыков в реальность. Тут, разумеется, надо трезво оценивать ваши силы, но и не бояться нового сверх меры. Разделите для себя новый маневр на положения, где вы уже летали в реальности и хорошо контролируете модель и положения, где вы еще не летали, т.е. испытываете неуверенность. Начните маневр с ведения модели в зоне уверенного контроля, немного зайдите в зону неуверенности и сразу выйдете из маневра. С ростом навыка зона неуверенности будет сужаться, и вы сможете наступать на нее все больше и больше. Например, отработка полета по кругу по часовой стрелке. Проблемное положение – выход модели кабиной на пилота от положения двенадцать часов до положения шесть часов. Начните отработку с пролета половины круга от шести часов до двенадцати, затем прервите выполнение, поверните модель хвостом к себе и верните ее в исходное положение. Далее начните круг с пяти часов и доведите до часа, затем снова верните модель в исходное положение. Задержитесь на этом разрыве и добейтесь более уверенного контроля модели на краях проблемной зоны. Затем отработайте круг с разрывом от двух до четырех часов и так далее, пока круг не замкнется.
Вилка “правильного” в вертолетном деле может быть достаточно широкой. Например, есть вполне конкретные правила балансировки и установки лопастей, которые обязательно надо выполнять, а есть индивидуальные предпочтения, например, пресловутую кривую газа каждый настраивает так, как считает удобным для себя. Использование симулятора это тоже вопрос индивидуальный. Наверняка, есть люди, которые «на дух» не переносят симуляторы, но готовы упорно заниматься на реальной модели. Найдутся и те, кто предпочтет симулятор, перенося в реальность только отточенные до совершенства маневры. В любом случае – пробуйте, ищите тот подход, который подойдет вам больше всего, главное, чтоб это нравилось и развивало навык управления реальной моделью.
Успешных тренировок!
Автор: Oleg http://onheli.blogspot.ru/2010/04/use-sim-right.html#more [onheli.blogspot.ru]
Счастлив тот кто не врёт, кто придуманным живёт
Офлайн
#11 Дек. 8, 2012 11:07:21
- CAMELION
-
-
- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5864
- Репутация:
12
- Профиль Отправить e-mail
Если вы новичёк или как настроить вертолёт!
Немножко информации для тех начинающих пилотов которые мечтают не просто полетать, а достичь каких либо успехов и в спортивном классе F3C (выполнение фигур).
Что такое FAI F3C?
F3C (Ф3Ц) – класс моделей радиоуправляемых вертолетов для соревнований по точному ( precision ) пилотированию.
В соревнованиях по Ф3Ц модель выполняет стандартный (утвержденный FAI – Международной Федерацией Авиаспорта) http://rcheli.com.ua/page_manevri_f3c_kxsh_161.html [rcheli.com.ua] которые условно можно разделить на статические – маневры висения (такие маневры может выполнить только вертолет), и динамические – маневры в горизонтальном и вертикальном полете (такие маневры в основном корреспондируются с пилотажными маневрами самолетов).
Суть соревнований – точное, прецизионное выполнение всех маневров на разрешенной технике, в заданной последовательности и в заданное время. Все спортсмены выполняют единый, одинаковый комплекс. В первенствах мирового и континентального уровня после полетов стандартного комплекса 15-ть лучших пилотов соревнуются в финале по отдельному финальному комплексу.
Комплекс или комплексы фигур утверждаются ФАИ раз в 4 года. Соревнования чемпионатов мира и континента проводятся чередуясь раз в 2 года каждые.

Модель для Ф3Ц
Каким должен быть вертолет? Правила Ф3Ц четко описывают требования к модели для соревнований:
«…Разрешается фиксированный или регулируемый стабилизатор до 2% площади охваченной несущим ротором (роторами)…
…Площадь, которую охватывает несущий ротор не может превышать 250 дм2. ..
а) ВЕС: Вес модели (с топливом и батареями) не должен превышать 6,5 кг.
б) МОТОР: Максимальный рабочий объем поршневого двигателя:
15 см2 двухтактный,
20 см2 четырехтактный,
25 см2 только бензиновый.
Электрические двигатели ограничиваются максимальным (без нагрузки) напряжением 51 В для питания двигателя.
в) Гироскопы: … Использование электронных гироскопов ограничивается вращением вокруг оси отклонение от направления движения…
…Уровень звукового давления не должен превышать 87 dB (A) на мягкой (травяной) поверхности или 89 dB (A) на твердой (асфальт, цемент и т.д.) поверхности…»
В этом описании уже кроется ответ, ведь для стабильного, зрелищного и точного полета модель должна быть большой, мощной но экономичной (10 маневров, 6-10 минут полета!), тяжелой но без перегрузки ротора. А значит, мы должны использовать максимально эффективную силовую установку – 15 см3 нитро-двигатель или 12S электросистему, для таких моторов хороший ротор ок 200-210 дм2 и оптимальный полетный вес 6-6,3 кг.
Обращаю внимание – динамическая часть комплекса представляет из себя во многом «самолетный» полет, и здесь стабилизатор и киль необходимы. Поэтому у нашего Ф3Ц вертолета должен быть настоящий стабилизатор площадью ок 3-4 дм2 и соответственно настоящий киль.
Немаловажен внешний вид модели – ведь она должна быть легко различима и «читаема», а значит красивый аэродинамический фюзеляж подойдет в самый раз. Очень важно, что с таким фюзеляжем уровень шума ДВС значительно ниже допустимого, а ровный, «шелестящий» тембр мотора добавит позитивных впечатлений от полета.
Итак понятно - нам нужен большой (.90 или 700-й) вертолет, желательно в аэродинамическом фюзеляже. Но больших моделей производится немало, на что же обратить внимание?
Головка главного ротора
Наверное она в первую очередь и отличает Ф3Ц вертолеты. Поскольку в этом классе запрещены любые системы электронной стабилизации, то именно механическая система маховых движений лопасти и гироскопического эффекта самостабилизации сервооси с шарнирами Белла-Хиллера обеспечивает стабильный полет и точное управление. Наверное стоит отвлечься на шарнир Белла-Хиллера (Bell-Hiller). Это тот самый рычаг-качалка или рычаг-микшер, ось которого закреплена на рычаге шага цапфы лопасти. Шарнир Белла-Хиллера управляет шагом лопасти под воздействием внешнего управления-движения шайбы перекоса (это Белл), и под воздействием самостабилизирующего движения-качания сервооси (это Хиллер). Оба движения суммируются рычагом-качалкой и через рычаг шага изменяют положение лопасти.
Зачем нужна сложная система стабилизации модели вертолета? Представим себе летящий вертолет с вращающимся ротором (или, что физически одно и то же, вертолет, зависший на ветру). Наверное стоит напомнить, что при горизонтальном полете суммарная скорость протока воздуха (скорость полета плюс скорость вращения ротора) на набегающей лопасти будет больше, чем на убегающей. А значит, на набегающей лопасти подъемная сила будет больше, и вертолет должен «уйти на бочку»! Вот здесь и начинают работать наша точная механика головки, которая автоматически воздействует на лопасти циклически (периодически) уменьшая или увеличивая их шаг и восстанавливая - сохраняя положение модели.
Маховое движение лопасти, «дельта» и демпферы
Эта система стабилизации на моделях является важной, но не основной. Хотя заметим, что на больших вертолетах с многолопастными роторами для стабилизации полета достаточно только её. Но у нас размеры поменьше и только две лопасти на роторе.
Наш вертолет летит, и под действием образовавшейся неравной подъемной силы на разных лопастях начинает крениться. Ось лопастей ротора модели не прикреплена жестко главному валу (обычно она установлена на эластичных демпферах, или шарнире с демпферами), и поэтому за счет такого мягкого подвеса и мощного гироскопического эффекта ротора, ротор остается горизонтальным (при этом лопасти циклически-периодически поднимаются то вверх то вниз – это мах, взмахивание лопастей). И в этот момент начинает свою работу рычаг Белла – тяга, которая связывает лопасть с шайбой перекоса. В классическом случае, шарнир рычага лопасти находится не на перпендикуляре оси симметрии лопастей, а немного смещен к креплению «своей» лопасти – это и есть «положительная дельта» (positive delta). В этом случае, при крене модели и горизонтальном роторе автоматически будет уменьшаться шаг (и подъемная сила!) набегающей лопасти, а убегающей – увеличиваться. Такое изменение будет препятствовать крену и поможет удержать модель в горизонте. Для нашего небольшого ротора этот эффект стабилизации за счет такого махового движения совсем невелик, и в Ф3Ц часто шарнир рычага лопасти находится симметрично на перпендикуляре оси симметрии лопастей, это «нулевая дельта», и маховое движение лопасти не оказывает никакого стабилизирующего воздействия. А вот на некоторых 3Д моделях шарнир ставят впереди оси, что наоборот способствует крену – модель тогда будет очень резкой и неустойчивой. Надеюсь понятно, что говоря о положении шарнира, я имел ввиду, что рычаг шага лопасти расположен со стороны ее передней кромки. Если со стороны задней, то положительная и отрицательная дельты меняются. Посмотрите фото, поставьте перед собой свою модель и покачайте «качели» лопастей (шайба перекоса стоит неподвижно!) – и вы увидите описанные эффекты. Если в Вашей модели есть возможность установки дельты (дополнительные отверстия для крепления шарнира) – начнете с нейтральной, нулевой дельты. И если в процессе полетов не возможно будет добиться полной стабильности – можно будет попробовать и положительную дельту.
Поскольку межлопастная ось (shpindle, шпиндель) при махах лопастей наклоняется-качается в эластичных демпферах (damper), то конечно чем мягче такой демпфер, тем легче оси качаться и тем соответственно лучше работает самостабилизация. Демпферы, применяемые в Ф3Ц, средние или мягкие по жесткости, в 3Д жесткие или очень жесткие. Обычно оптимальные демпферы ставит производитель, а замена демферов кроме положительных изменений в стабилизации может вызвать и паразитные резонансы – раскачивание модели при слишком мягких демпферах, дрожание и вибрации при слишком жестких.
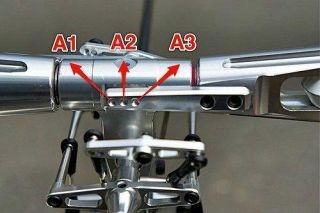
На фото мы видим рычаг шага лопасти с тремя установочными отверстиями для оси рычага-микшера шарнира Белла-Хиллера (сам рычаг-микшер снят):
А1 – отрицательная дельта (обычно для 3Д)
А2 – нулевая дельта (универсальная настройка)
А3 – положительная дельта (для Ф3Ц и для моделей копий)
Сервоось – «флайбар» и передаточное отношение
Сервоось или флайбар (flybar) – наш главный стабилизатор и … главный возмутитель! Да-да, ведь флайбар имеет две рабочих оси, где поперечная (ось качания) отвечает за самостабилизацию модели, а продольная (ось вращения севолопаток) за выполнение переворотов по крену (aileron, элерон) и тангажу (elevator, элеватор).
Нас интересует функция самостабилизации. Изобретение Белла, флайбар (flybar), самое эффективное механическое стабилизирующее устройство ротора модели вертолета. Да и в большой технике у роторов с малой заполняемостью и полужесткой подвеской обязательно применяется флайбар. Как же он работает? Вернемся к нашему летящему (или зависшему на ветру) вертолету. Вот он кренится под воздействием известных уже нам сил, ротор стремиться сохранить «горизонт», лопасти циклично совершают мах… но небольшой диаметр ротора и несвободная подвеска лопастей ограничивают эффективность маховой стабилизации. Но флайбар, шарнирно закрепленный перпендикулярно лопастям, тоже ведь за счет гироскопического момента сохраняет горизонтальное положение! При этом, поскольку между плоскостью флайбара и плоскостью ротора появляется угол, флайбар через рычаг-микшер (шарнир Бела-Хиллера) начинает воздействовать на рычаг шага лопасти и циклически изменять ее шаг противодействуя крену! Но ведь лопасти и флайбар расположены перпендикулярно, почему же тогда при крене лопасти компенсируют крен а не тангаж? Это одно из особых свойств аэродинамики ротора, оказывается, воздействие флайбара имеет задержку по фазе (фазинг) примерно на 90 градусов, поэтому и расположен он с лопастями под прямым углом. В некоторых моделях это может быть не прямой угол («примерно 90 град»), а например 84-86 град – он точно рассчитан и подобран на тестах.
Стабилизирующее воздействие флайбара в моделях Ф3Ц регулируется и настраивается двумя путями. Первый – подбор передачи (Bell-Hiller ratio). Установите шаг в ноль а флайбар в горизонт. Наклоните ось флайбара скажем на 20 градусов и померяйте насколько изменился угол лопасти. Если это будет 10 градусов, то коэффициент передачи или просто передача составит 2(лопасти)*А(угол лопасти) / В(угол флайбара) = 2*10/20 = 1. Значит передача равна 1. Теперь переставьте шарик короткой тяги флайбара в другое отверстие рычага-микшера. Пусть у нас выйдет при 20 градусах наклона оси флайбара 8 гадусов на лопасти, или передача 2*8/20=0,8. Мы видим, что в первом случае, наклон оси флайбара вызывал больший угол (больший отклик, реакцию) а значит большее воздействие лопасти для стабилизации положения модели, во втором же случае – меньшее. Таким образом можно просто настраивать эффект работы флайбара. Обычно для Ф3Ц вертолетов коэффициент передачи флайбара 0,9…1,1, для 3Д это 0,5…0,7. Мы можем смело начинать с универсальных 1,0, а затем переставляя шарики на рычаге-микшере (у Ф3Ц вертолетов обычно 3-4 варианта) подобрать необходимую нам устойчивость модели. При настройках надо помнить, что положение шариков определяет и величину общего шага (collective pitch) главных лопастей, и при некоторых установках уже может «не хватить» общего шага - настраивая передачу не забывайте проверять и шаг главного ротора!
Второй путь настройки – это изменение веса флайбара. Поскольку выдерживать «горизонт» флайбару позволяет гироскопический момент, то понятно – чем тяжелее этот гироскоп и чем выше его обороты – тем он стабильнее держит положение. Для загрузки и регулировки флайбара применяются небольшие грузики (flybar weights), которые надеты на его ось (справа и слева от головки ротора). Их можно двигать по оси флайбара (но только строго симметрично!) и крепить с помощью зажима болтом или цангой. Чем дальше грузики от центра, тем больше центробежная сила и гиро-эффект, тем лучше флайбар удерживает «горизонт» и стабилизирует модель. В большинстве Ф3Ц вертолетов грузики (а их вес тщательно подбирается производителем) находятся примерно посредине каждой половинки оси флайбара.
Настаиваем флайбар так. Для начала сдвинем грузики к ротору и установим-запрограммируем стабильные обороты ротора. Регулировки проводим при ровном ветре 2-4 м/с (это важно!). Взлетев на высоте 2 м, устанавливаем модель носом к ветру и, минимально корректируя, следим за ее поведением. Модель может сносить по ветру, это нормально, а вот движения-снос в бок, движение на ветер мы должны максимально устранить. Для этого сначала переставляем шарики на рычагах-микшерах и находим положение минимального дрейфа модели. Затем начинаем понемногу раздвигать грузики. Если грузики дошли до края флайбара, а вертолет продолжает дрейфовать, можно переставить рычаги-микшеры на рычагах шага – то есть установить положительную дельту. Если вертолет остается неустойчивым, тогда можно увеличить вес грузиков и/или поднять обороты ротора. Возможно придется поменять демпферы шпинделя лопастей на более мягкие чтобы облегчить мах лопасти (но слишком мягкие демпферы могут сделать вертолет склонным к резонансу-раскачиванию). Надо заметить, что у некоторых моделей флайбар работает излишне активно, и дрейф связан с «перекомпенсацией» флайбара – в этом случае передача должна быть уменьшена, а возможно придется даже установить отрицательную дельту.
Процесс таких настроек достаточно долог, но он очень важен! Результатом должно быть стабильное точное висение модели (возможно, с небольшим сносом по ветру) в любом положении – носом, боком, хвостом к ветру. Причем так должно быть во всем рабочем диапазоне оборотов главного ротора!


bigmir)net TOP 100
СТАТЬИ >
Моё F3C >
В прошлом веке ( ха-ха!) когда я поднял в небо свой первый 60-й двс вертолет, все следующие шаги освоения техники пилотирования были понятны и однозначны – висение, горизонтальный полет, простые пилотажные фигуры, комплекс Ф3Ц. Других спортивных классов просто не было… Прошло не так много времени, и теперь кажется что все поголовно летают только 3Д. Любой новичок, чуть повисев и полетав вокруг себя стремиться «крутнуть» что-нибудь этакое и заявить «я – 3Д пилот!». Наверное, засилье таких «пилотов» и возродило волну интереса к Ф3Ц – классическому, или даже академическому пилотированию, настоящей школе мастерства владения и управления моделью в каждой точке траектории маневра. Не удивляет меня и интерес опытных спортсменов 3Д-шников – ведь в соревнованиях Ф3Ц все пилоты летают единый обязательный комплекс, и субъективность оценки судей (и самооценки пилота!) в Ф3Ц сведена к минимуму.
Я постараюсь немного обобщить собственный опыт в этом классе. Не претендуя на «истину в последней инстанции», надеюсь просто помочь вновь пришедшим в Ф3Ц избежать традиционных ошибок.
Что такое FAI F3C?
F3C (Ф3Ц) – класс моделей радиоуправляемых вертолетов для соревнований по точному ( precision ) пилотированию.
В соревнованиях по Ф3Ц модель выполняет стандартный (утвержденный FAI – Международной Федерацией Авиаспорта) комплекс из 10-ти маневров, которые условно можно разделить на статические – маневры висения (такие маневры может выполнить только вертолет), и динамические – маневры в горизонтальном и вертикальном полете (такие маневры в основном корреспондируются с пилотажными маневрами самолетов).
Суть соревнований – точное, прецизионное выполнение всех маневров на разрешенной технике, в заданной последовательности и в заданное время. Все спортсмены выполняют единый, одинаковый комплекс. В первенствах мирового и континентального уровня после полетов стандартного комплекса 15-ть лучших пилотов соревнуются в финале по отдельному финальному комплексу.
Комплекс или комплексы фигур утверждаются ФАИ раз в 4 года. Соревнования чемпионатов мира и континента проводятся чередуясь раз в 2 года каждые.
Модель для Ф3Ц
Каким должен быть вертолет? Правила Ф3Ц четко описывают требования к модели для соревнований:
«…Разрешается фиксированный или регулируемый стабилизатор до 2% площади охваченной несущим ротором (роторами)…
…Площадь, которую охватывает несущий ротор не может превышать 250 дм2. ..
а) ВЕС: Вес модели (с топливом и батареями) не должен превышать 6,5 кг.
б) МОТОР: Максимальный рабочий объем поршневого двигателя:
15 см2 двухтактный,
20 см2 четырехтактный,
25 см2 только бензиновый.
Электрические двигатели ограничиваются максимальным (без нагрузки) напряжением 51 В для питания двигателя.
в) Гироскопы: … Использование электронных гироскопов ограничивается вращением вокруг оси отклонение от направления движения…
…Уровень звукового давления не должен превышать 87 dB (A) на мягкой (травяной) поверхности или 89 dB (A) на твердой (асфальт, цемент и т.д.) поверхности…»
В этом описании уже кроется ответ, ведь для стабильного, зрелищного и точного полета модель должна быть большой, мощной но экономичной (10 маневров, 6-10 минут полета!), тяжелой но без перегрузки ротора. А значит, мы должны использовать максимально эффективную силовую установку – 15 см3 нитро-двигатель или 12S электросистему, для таких моторов хороший ротор ок 200-210 дм2 и оптимальный полетный вес 6-6,3 кг.
Обращаю внимание – динамическая часть комплекса представляет из себя во многом «самолетный» полет, и здесь стабилизатор и киль необходимы. Поэтому у нашего Ф3Ц вертолета должен быть настоящий стабилизатор площадью ок 3-4 дм2 и соответственно настоящий киль.
Немаловажен внешний вид модели – ведь она должна быть легко различима и «читаема», а значит красивый аэродинамический фюзеляж подойдет в самый раз. Очень важно, что с таким фюзеляжем уровень шума ДВС значительно ниже допустимого, а ровный, «шелестящий» тембр мотора добавит позитивных впечатлений от полета.
Итак понятно - нам нужен большой (.90 или 700-й) вертолет, желательно в аэродинамическом фюзеляже. Но больших моделей производится немало, на что же обратить внимание?
Головка главного ротора
Наверное она в первую очередь и отличает Ф3Ц вертолеты. Поскольку в этом классе запрещены любые системы электронной стабилизации, то именно механическая система маховых движений лопасти и гироскопического эффекта самостабилизации сервооси с шарнирами Белла-Хиллера обеспечивает стабильный полет и точное управление. Наверное стоит отвлечься на шарнир Белла-Хиллера (Bell-Hiller). Это тот самый рычаг-качалка или рычаг-микшер, ось которого закреплена на рычаге шага цапфы лопасти. Шарнир Белла-Хиллера управляет шагом лопасти под воздействием внешнего управления-движения шайбы перекоса (это Белл), и под воздействием самостабилизирующего движения-качания сервооси (это Хиллер). Оба движения суммируются рычагом-качалкой и через рычаг шага изменяют положение лопасти.
Зачем нужна сложная система стабилизации модели вертолета? Представим себе летящий вертолет с вращающимся ротором (или, что физически одно и то же, вертолет, зависший на ветру). Наверное стоит напомнить, что при горизонтальном полете суммарная скорость протока воздуха (скорость полета плюс скорость вращения ротора) на набегающей лопасти будет больше, чем на убегающей. А значит, на набегающей лопасти подъемная сила будет больше, и вертолет должен «уйти на бочку»! Вот здесь и начинают работать наша точная механика головки, которая автоматически воздействует на лопасти циклически (периодически) уменьшая или увеличивая их шаг и восстанавливая - сохраняя положение модели.
Маховое движение лопасти, «дельта» и демпферы
Эта система стабилизации на моделях является важной, но не основной. Хотя заметим, что на больших вертолетах с многолопастными роторами для стабилизации полета достаточно только её. Но у нас размеры поменьше и только две лопасти на роторе.
Наш вертолет летит, и под действием образовавшейся неравной подъемной силы на разных лопастях начинает крениться. Ось лопастей ротора модели не прикреплена жестко главному валу (обычно она установлена на эластичных демпферах, или шарнире с демпферами), и поэтому за счет такого мягкого подвеса и мощного гироскопического эффекта ротора, ротор остается горизонтальным (при этом лопасти циклически-периодически поднимаются то вверх то вниз – это мах, взмахивание лопастей). И в этот момент начинает свою работу рычаг Белла – тяга, которая связывает лопасть с шайбой перекоса. В классическом случае, шарнир рычага лопасти находится не на перпендикуляре оси симметрии лопастей, а немного смещен к креплению «своей» лопасти – это и есть «положительная дельта» (positive delta). В этом случае, при крене модели и горизонтальном роторе автоматически будет уменьшаться шаг (и подъемная сила!) набегающей лопасти, а убегающей – увеличиваться. Такое изменение будет препятствовать крену и поможет удержать модель в горизонте. Для нашего небольшого ротора этот эффект стабилизации за счет такого махового движения совсем невелик, и в Ф3Ц часто шарнир рычага лопасти находится симметрично на перпендикуляре оси симметрии лопастей, это «нулевая дельта», и маховое движение лопасти не оказывает никакого стабилизирующего воздействия. А вот на некоторых 3Д моделях шарнир ставят впереди оси, что наоборот способствует крену – модель тогда будет очень резкой и неустойчивой. Надеюсь понятно, что говоря о положении шарнира, я имел ввиду, что рычаг шага лопасти расположен со стороны ее передней кромки. Если со стороны задней, то положительная и отрицательная дельты меняются. Посмотрите фото, поставьте перед собой свою модель и покачайте «качели» лопастей (шайба перекоса стоит неподвижно!) – и вы увидите описанные эффекты. Если в Вашей модели есть возможность установки дельты (дополнительные отверстия для крепления шарнира) – начнете с нейтральной, нулевой дельты. И если в процессе полетов не возможно будет добиться полной стабильности – можно будет попробовать и положительную дельту.
Поскольку межлопастная ось (shpindle, шпиндель) при махах лопастей наклоняется-качается в эластичных демпферах (damper), то конечно чем мягче такой демпфер, тем легче оси качаться и тем соответственно лучше работает самостабилизация. Демпферы, применяемые в Ф3Ц, средние или мягкие по жесткости, в 3Д жесткие или очень жесткие. Обычно оптимальные демпферы ставит производитель, а замена демферов кроме положительных изменений в стабилизации может вызвать и паразитные резонансы – раскачивание модели при слишком мягких демпферах, дрожание и вибрации при слишком жестких.
На фото мы видим рычаг шага лопасти с тремя установочными отверстиями для оси рычага-микшера шарнира Белла-Хиллера (сам рычаг-микшер снят):
А1 – отрицательная дельта (обычно для 3Д)
А2 – нулевая дельта (универсальная настройка)
А3 – положительная дельта (для Ф3Ц и для моделей копий)
Сервоось – «флайбар» и передаточное отношение
Сервоось или флайбар (flybar) – наш главный стабилизатор и … главный возмутитель! Да-да, ведь флайбар имеет две рабочих оси, где поперечная (ось качания) отвечает за самостабилизацию модели, а продольная (ось вращения севолопаток) за выполнение переворотов по крену (aileron, элерон) и тангажу (elevator, элеватор).
Нас интересует функция самостабилизации. Изобретение Белла, флайбар (flybar), самое эффективное механическое стабилизирующее устройство ротора модели вертолета. Да и в большой технике у роторов с малой заполняемостью и полужесткой подвеской обязательно применяется флайбар. Как же он работает? Вернемся к нашему летящему (или зависшему на ветру) вертолету. Вот он кренится под воздействием известных уже нам сил, ротор стремиться сохранить «горизонт», лопасти циклично совершают мах… но небольшой диаметр ротора и несвободная подвеска лопастей ограничивают эффективность маховой стабилизации. Но флайбар, шарнирно закрепленный перпендикулярно лопастям, тоже ведь за счет гироскопического момента сохраняет горизонтальное положение! При этом, поскольку между плоскостью флайбара и плоскостью ротора появляется угол, флайбар через рычаг-микшер (шарнир Бела-Хиллера) начинает воздействовать на рычаг шага лопасти и циклически изменять ее шаг противодействуя крену! Но ведь лопасти и флайбар расположены перпендикулярно, почему же тогда при крене лопасти компенсируют крен а не тангаж? Это одно из особых свойств аэродинамики ротора, оказывается, воздействие флайбара имеет задержку по фазе (фазинг) примерно на 90 градусов, поэтому и расположен он с лопастями под прямым углом. В некоторых моделях это может быть не прямой угол («примерно 90 град»), а например 84-86 град – он точно рассчитан и подобран на тестах.
Стабилизирующее воздействие флайбара в моделях Ф3Ц регулируется и настраивается двумя путями. Первый – подбор передачи (Bell-Hiller ratio). Установите шаг в ноль а флайбар в горизонт. Наклоните ось флайбара скажем на 20 градусов и померяйте насколько изменился угол лопасти. Если это будет 10 градусов, то коэффициент передачи или просто передача составит 2(лопасти)*А(угол лопасти) / В(угол флайбара) = 2*10/20 = 1. Значит передача равна 1. Теперь переставьте шарик короткой тяги флайбара в другое отверстие рычага-микшера. Пусть у нас выйдет при 20 градусах наклона оси флайбара 8 гадусов на лопасти, или передача 2*8/20=0,8. Мы видим, что в первом случае, наклон оси флайбара вызывал больший угол (больший отклик, реакцию) а значит большее воздействие лопасти для стабилизации положения модели, во втором же случае – меньшее. Таким образом можно просто настраивать эффект работы флайбара. Обычно для Ф3Ц вертолетов коэффициент передачи флайбара 0,9…1,1, для 3Д это 0,5…0,7. Мы можем смело начинать с универсальных 1,0, а затем переставляя шарики на рычаге-микшере (у Ф3Ц вертолетов обычно 3-4 варианта) подобрать необходимую нам устойчивость модели. При настройках надо помнить, что положение шариков определяет и величину общего шага (collective pitch) главных лопастей, и при некоторых установках уже может «не хватить» общего шага - настраивая передачу не забывайте проверять и шаг главного ротора!
Второй путь настройки – это изменение веса флайбара. Поскольку выдерживать «горизонт» флайбару позволяет гироскопический момент, то понятно – чем тяжелее этот гироскоп и чем выше его обороты – тем он стабильнее держит положение. Для загрузки и регулировки флайбара применяются небольшие грузики (flybar weights), которые надеты на его ось (справа и слева от головки ротора). Их можно двигать по оси флайбара (но только строго симметрично!) и крепить с помощью зажима болтом или цангой. Чем дальше грузики от центра, тем больше центробежная сила и гиро-эффект, тем лучше флайбар удерживает «горизонт» и стабилизирует модель. В большинстве Ф3Ц вертолетов грузики (а их вес тщательно подбирается производителем) находятся примерно посредине каждой половинки оси флайбара.
Настаиваем флайбар так. Для начала сдвинем грузики к ротору и установим-запрограммируем стабильные обороты ротора. Регулировки проводим при ровном ветре 2-4 м/с (это важно!). Взлетев на высоте 2 м, устанавливаем модель носом к ветру и, минимально корректируя, следим за ее поведением. Модель может сносить по ветру, это нормально, а вот движения-снос в бок, движение на ветер мы должны максимально устранить. Для этого сначала переставляем шарики на рычагах-микшерах и находим положение минимального дрейфа модели. Затем начинаем понемногу раздвигать грузики. Если грузики дошли до края флайбара, а вертолет продолжает дрейфовать, можно переставить рычаги-микшеры на рычагах шага – то есть установить положительную дельту. Если вертолет остается неустойчивым, тогда можно увеличить вес грузиков и/или поднять обороты ротора. Возможно придется поменять демпферы шпинделя лопастей на более мягкие чтобы облегчить мах лопасти (но слишком мягкие демпферы могут сделать вертолет склонным к резонансу-раскачиванию). Надо заметить, что у некоторых моделей флайбар работает излишне активно, и дрейф связан с «перекомпенсацией» флайбара – в этом случае передача должна быть уменьшена, а возможно придется даже установить отрицательную дельту.
Процесс таких настроек достаточно долог, но он очень важен! Результатом должно быть стабильное точное висение модели (возможно, с небольшим сносом по ветру) в любом положении – носом, боком, хвостом к ветру. Причем так должно быть во всем рабочем диапазоне оборотов главного ротора!
На фото мы видим рычаг-микшер (шарнир Белла-Хиллера) с четырьмя отверстиями для шариков.
В1-С1 – передача 1, средний шаг ротора (Ф3Ц)
В2-С2 – передача 1, небольшой шаг ротора
В1-С2 – передача >1, минимальный шаг ротора
В2-С1 – передача <1, максимальный шаг ротора (3Д)
Серволопатки, пичкомпенсатор – снова передача
Мы теперь знаем, что флайбар работает за счет гироскопического момента. Казалось бы, можно сделать его короче и с грузами на концах (как в больших двухлопастных вертолетах). Но нет – у нас относительно длинная сервоось с небольшими лопастями на концах (серволопатками), да еще и с возможностью продольного поворота – зачем? А затем, что на малых роторах с флайбарной системой стабилизации управление креном и тангажом только за счет циклического изменения шага ротора (cyclic pich, «циклик») очень неэффективно и инертно, и управляться наша модель будет вяло и с большой задержкой. В 1966 году немецкий инженер-авиамоделист Дитмар Шлюттер (Ditmar Schlutter) придумал удлинить сервоось и поставить поворотные лопатки (paddles, серволопатки) по ее концам – это изобретение, без преувеличения, стало основой всех будущих управляемых моделей вертолетов!
Работает система крайне просто – как только мы поворачиваем лопатки, они сразу создают наклон плоскости сервооси, выводя тем самым ее из равновесного самостабилизированного положения. Этот наклон флайбара немедленно через рычаг-микшер (шарнир Белл-Хиллер) изменяет циклический шаг так, что вертолет совершает переворот по крену (элерону) или тангажу (элеватору) пока вновь не будет достигнута самостабилизация. Если вы продолжаете удерживать лопатки повернутыми (держите ручку крена или тангажа) – модель будет вращаться-кувыркаться. Надеюсь, не надо объяснять, что чем больше площадь-размер серволопаток, их угол наклона, и чем длинее сервоось (плечо приложения их усилия) тем вертолет будет резче и активнее управляться.
Работая общим шагом (collective pitch) мы двигаем шайбу перекоса а вместе с ней и рычаги шага лопасти. Расстояние между шайбой и ротором меняется, и каким-то образом надо изменять и длину тяг флайбара. Поперечное качание флайбара в этом случае скомпенсировано рычагами-микшерами, а для компенсации его продольных наклонов есть пич-компенсатор (pitch-compensator). Это втулка свободно двигающаяся по валу и являющаяся местом крепления рычагов от шайбы к тягам поворота флайбара. Эти рычаги не симметричны, и имеют повышенную передачу – ведь они управляют небольшими серволопатками, и угол наклона серволопаток должен быть большим, значительно больше чем угол наклона шайбы.
Настройку серволопаток проводят проверяя реакции модели на команды крена и тангажа. Мы можем установить шарики в разные отверстия рычагов пич-компесатора, тем самым изменив угол наклона серволопаток и сделав вертолет резче или спокойнее по реакциям на управление. Если изменения угла не достаточно, тогда меняем лопатки – меньшие для более спокойной реакции, большие – для более резкой. Но не забываем, что разные лопатки имеют разный вес, что будет влиять на работу флайбара.

На фото изображен рычаг пич-компенсатора.
D1 – больший угол, резкая реакция
D2 – меньший угол, спокойная реакция
Шайба перекоса 90, 120 или 140/135 ?
Больше двух десятилетий система управления шайбой перекоса модели вертолета была неизменной – на каждую функцию работало отдельное серво, это так называемая система Хели 1 (Н1, Н1-90). То есть серво крена (элерон) наклоняло шайбу вправо-влево, серво тангажа (элеватор) наклоняло ее вперед назад. А вот механизм работы серво общего шага (а это должно быть очень мощное серво!) был несколько сложнее – двигать вверх-вниз шайбу можно было только через систему сложных рычагов (например модели Хиробо), или двигая площадку с установленными на ней сервами крена и тангажа (например ТТ Раптор), или качая коромысла с севами крена и тангажа (модели Роббе – Шлюттер). В целом, в плане кинематики Хели 1 наиболее точная система, но в плане простоты и стоимости она проигрывает.
Вся эта громоздкая система значительно упростилась с появлением программируемых микшеров в аппаратуре и точных серво. Такое радио «смешивает» и одновременно подает на серво команды крена-тангажа-шага, поэтому теперь за каждую функцию управления отвечает 2-3 серво.
Наиболее распространенная система Хели 3 – 120 град (Н3-120, HR3-120) на первый взгляд логична и понятна – все шарики/шарниры шайбы развернуты под одинаковыми углами 120 град. Но если внимательно посмотреть на ее работу, проверить равномерность движения шайбы перекоса и линейность наклона при тангаже, то окажется что шайба движется вверх-вниз покачиваясь, а наклоняясь еще и произвольно меняет общий шаг! Но почему? Посмотрите на модель с боку, и вы увидите что плечи (расстояние от оси вала до плоскости шариков шайбы) приложения усилия на шайбу разные. То есть, примерно, для обеспечения 5 град циклического шага тангажа (элеватор), серво тангажа должно отклониться на 10 град, а два боковых серво на 5 град. Наверное понятно, чтобы обеспечить такую точность микширования, радио должно иметь высокое разрешение, а серво работать как прецизионный механизм. Но при этом, поскольку у серво шайбы одинаковая (практически) скорость работы, то два серво на меньший угол 5 град, конечно же, отклоняться быстрее, чем серво тангажа на больший в 10 град – а значит произойдет непроизвольное движение шайбы и изменение общего шага!
Чтобы как то решить эту проблему, около 2000-го года пилот Кертис Янгблад придумал разместить все шарики на одинаковом плече приложения усилия – так появилась система «140 градусов» (примерный угол «развала» шариков крена и тангажа), или Хели 3 - 140 (Н3-140). Чуть позже фирма Хиробо придала этой системе геометрическую законченность, изменив угол на 135 град, появилась Хели 3 – 135 (Н3-135). Большого различия между «140» и «135» нет (немного отличается отработка по крену), а общее достоинство одно – совместно работающие пары и тройки серво при раздельных командах всегда откланяются на одинаковые углы!
Так что же выбрать? Динозавры вымерли, и кинематически совершенная но сложная система Н1 тоже вымирает как динозавр, наверное уже почти и не осталось вертолетов с Н1. Выбор Н3-120 оправдан, если вы на 101% уверены в точности, прецизионности своих серво и радио. Выбор же Н3-140/135 по моему мнению будет самым правильным. Многие производители предлагают сразу два варианта сборки модели – под 120 и 140 град, и это очень хороший вариант.
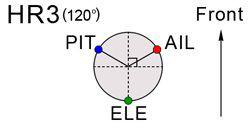

Схема и шайба перекоса системы Н3 – 120
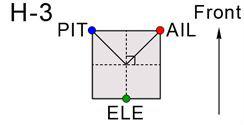

Схема и шайба перекоса системы Н3–140
 Комплект универсальной Н3-120 и Н3-140 шайбы перекоса
Комплект универсальной Н3-120 и Н3-140 шайбы перекоса
Привод шайбы – почему “Push-Pull”?
Классическая система привода шайбы через рычаг-коромысло (Push-Pull, «тяни-толкай») остается востребованной и в 3Д моделях. А в Ф3Ц это можно даже не обсуждать! Плюсы на лицо:
- жесткий рычаг-коромысло установлен на двух подшипниках и исключает деформации и смещения при работе привода управления
- подбор/изменение длины-плеча рычага привода тяги шайбы перекоса не требует смены качалок серво, а иногда и поиска качалок редкого (большого) размера
- симметричная нагрузка подшипника вала серво фактически вдвое снижает его износ
- простая механическая настройка положения шайбы без применения саб-триммеров
- конструктивное и компоновочное удобство механики вертолета
- зачастую рычаг-коромысло спасает редуктор серво при авариях
Минусы, а именно вес и небольшое усложнение конструкции можно пропустить – так как мы говорим о изначально не легкой и не простой модели.
Привод хвоста - ремень или вал?
Вот уж что дело вкуса и собственных предпочтений – это ремень или вал на хвост!
Простая, мягкая в работе ременная передача имеет дополнительные механические потери (что бывает заметно на авторотациях), хотя авторотации на больших моделях вертолетов (с большим, тяжелым ротором - считай маховиком) выполняются достаточно легко и с ременным хвостом.
Сложная, но точная и жесткая карданная передача, конечно же, немного четче в управлении и экономичнее при авторотациях. Но, малейшее касание земли хвостом – и меняем шестеренки! Да и зазор в «коничках» выставить часто оказывается совсем не просто.
Авторотации в Ф3Ц используются постоянно (каждый полет!). И, наверное, пилотам с не очень большим опытом лучше подойдет ремень – как значительно более живучий привод при мелких неудачах.
Так какой же вертолет покупать?
Это уж выбирайте сами, я рассказал только о том, на что стоит обратить внимание. Единственно, я бы не стал увлекаться моделями фирм-новичков в Ф3Ц. Класс Ф3Ц весьма консервативен, и традиции и опыт в проектировании моделей Ф3Ц имеют колоссальное значение. Посмотрите внимательно на технику известных производителей Ф3Ц, посмотрите, на чем летают мировые пилоты (например, HIROBO Eagle и Freya, JR Sylphide и Airskipper, CY Rave ENV…). Ну и конечно оцените свой бюджет и возможности в эксплуатации и ремонте.
Взято: http://rcheli.com.ua [rcheli.com.ua]
Счастлив тот кто не врёт, кто придуманным живёт
Что такое FAI F3C?
F3C (Ф3Ц) – класс моделей радиоуправляемых вертолетов для соревнований по точному ( precision ) пилотированию.
В соревнованиях по Ф3Ц модель выполняет стандартный (утвержденный FAI – Международной Федерацией Авиаспорта) http://rcheli.com.ua/page_manevri_f3c_kxsh_161.html [rcheli.com.ua] которые условно можно разделить на статические – маневры висения (такие маневры может выполнить только вертолет), и динамические – маневры в горизонтальном и вертикальном полете (такие маневры в основном корреспондируются с пилотажными маневрами самолетов).
Суть соревнований – точное, прецизионное выполнение всех маневров на разрешенной технике, в заданной последовательности и в заданное время. Все спортсмены выполняют единый, одинаковый комплекс. В первенствах мирового и континентального уровня после полетов стандартного комплекса 15-ть лучших пилотов соревнуются в финале по отдельному финальному комплексу.
Комплекс или комплексы фигур утверждаются ФАИ раз в 4 года. Соревнования чемпионатов мира и континента проводятся чередуясь раз в 2 года каждые.
Модель для Ф3Ц
Каким должен быть вертолет? Правила Ф3Ц четко описывают требования к модели для соревнований:
«…Разрешается фиксированный или регулируемый стабилизатор до 2% площади охваченной несущим ротором (роторами)…
…Площадь, которую охватывает несущий ротор не может превышать 250 дм2. ..
а) ВЕС: Вес модели (с топливом и батареями) не должен превышать 6,5 кг.
б) МОТОР: Максимальный рабочий объем поршневого двигателя:
15 см2 двухтактный,
20 см2 четырехтактный,
25 см2 только бензиновый.
Электрические двигатели ограничиваются максимальным (без нагрузки) напряжением 51 В для питания двигателя.
в) Гироскопы: … Использование электронных гироскопов ограничивается вращением вокруг оси отклонение от направления движения…
…Уровень звукового давления не должен превышать 87 dB (A) на мягкой (травяной) поверхности или 89 dB (A) на твердой (асфальт, цемент и т.д.) поверхности…»
В этом описании уже кроется ответ, ведь для стабильного, зрелищного и точного полета модель должна быть большой, мощной но экономичной (10 маневров, 6-10 минут полета!), тяжелой но без перегрузки ротора. А значит, мы должны использовать максимально эффективную силовую установку – 15 см3 нитро-двигатель или 12S электросистему, для таких моторов хороший ротор ок 200-210 дм2 и оптимальный полетный вес 6-6,3 кг.
Обращаю внимание – динамическая часть комплекса представляет из себя во многом «самолетный» полет, и здесь стабилизатор и киль необходимы. Поэтому у нашего Ф3Ц вертолета должен быть настоящий стабилизатор площадью ок 3-4 дм2 и соответственно настоящий киль.
Немаловажен внешний вид модели – ведь она должна быть легко различима и «читаема», а значит красивый аэродинамический фюзеляж подойдет в самый раз. Очень важно, что с таким фюзеляжем уровень шума ДВС значительно ниже допустимого, а ровный, «шелестящий» тембр мотора добавит позитивных впечатлений от полета.
Итак понятно - нам нужен большой (.90 или 700-й) вертолет, желательно в аэродинамическом фюзеляже. Но больших моделей производится немало, на что же обратить внимание?
Головка главного ротора
Наверное она в первую очередь и отличает Ф3Ц вертолеты. Поскольку в этом классе запрещены любые системы электронной стабилизации, то именно механическая система маховых движений лопасти и гироскопического эффекта самостабилизации сервооси с шарнирами Белла-Хиллера обеспечивает стабильный полет и точное управление. Наверное стоит отвлечься на шарнир Белла-Хиллера (Bell-Hiller). Это тот самый рычаг-качалка или рычаг-микшер, ось которого закреплена на рычаге шага цапфы лопасти. Шарнир Белла-Хиллера управляет шагом лопасти под воздействием внешнего управления-движения шайбы перекоса (это Белл), и под воздействием самостабилизирующего движения-качания сервооси (это Хиллер). Оба движения суммируются рычагом-качалкой и через рычаг шага изменяют положение лопасти.
Зачем нужна сложная система стабилизации модели вертолета? Представим себе летящий вертолет с вращающимся ротором (или, что физически одно и то же, вертолет, зависший на ветру). Наверное стоит напомнить, что при горизонтальном полете суммарная скорость протока воздуха (скорость полета плюс скорость вращения ротора) на набегающей лопасти будет больше, чем на убегающей. А значит, на набегающей лопасти подъемная сила будет больше, и вертолет должен «уйти на бочку»! Вот здесь и начинают работать наша точная механика головки, которая автоматически воздействует на лопасти циклически (периодически) уменьшая или увеличивая их шаг и восстанавливая - сохраняя положение модели.
Маховое движение лопасти, «дельта» и демпферы
Эта система стабилизации на моделях является важной, но не основной. Хотя заметим, что на больших вертолетах с многолопастными роторами для стабилизации полета достаточно только её. Но у нас размеры поменьше и только две лопасти на роторе.
Наш вертолет летит, и под действием образовавшейся неравной подъемной силы на разных лопастях начинает крениться. Ось лопастей ротора модели не прикреплена жестко главному валу (обычно она установлена на эластичных демпферах, или шарнире с демпферами), и поэтому за счет такого мягкого подвеса и мощного гироскопического эффекта ротора, ротор остается горизонтальным (при этом лопасти циклически-периодически поднимаются то вверх то вниз – это мах, взмахивание лопастей). И в этот момент начинает свою работу рычаг Белла – тяга, которая связывает лопасть с шайбой перекоса. В классическом случае, шарнир рычага лопасти находится не на перпендикуляре оси симметрии лопастей, а немного смещен к креплению «своей» лопасти – это и есть «положительная дельта» (positive delta). В этом случае, при крене модели и горизонтальном роторе автоматически будет уменьшаться шаг (и подъемная сила!) набегающей лопасти, а убегающей – увеличиваться. Такое изменение будет препятствовать крену и поможет удержать модель в горизонте. Для нашего небольшого ротора этот эффект стабилизации за счет такого махового движения совсем невелик, и в Ф3Ц часто шарнир рычага лопасти находится симметрично на перпендикуляре оси симметрии лопастей, это «нулевая дельта», и маховое движение лопасти не оказывает никакого стабилизирующего воздействия. А вот на некоторых 3Д моделях шарнир ставят впереди оси, что наоборот способствует крену – модель тогда будет очень резкой и неустойчивой. Надеюсь понятно, что говоря о положении шарнира, я имел ввиду, что рычаг шага лопасти расположен со стороны ее передней кромки. Если со стороны задней, то положительная и отрицательная дельты меняются. Посмотрите фото, поставьте перед собой свою модель и покачайте «качели» лопастей (шайба перекоса стоит неподвижно!) – и вы увидите описанные эффекты. Если в Вашей модели есть возможность установки дельты (дополнительные отверстия для крепления шарнира) – начнете с нейтральной, нулевой дельты. И если в процессе полетов не возможно будет добиться полной стабильности – можно будет попробовать и положительную дельту.
Поскольку межлопастная ось (shpindle, шпиндель) при махах лопастей наклоняется-качается в эластичных демпферах (damper), то конечно чем мягче такой демпфер, тем легче оси качаться и тем соответственно лучше работает самостабилизация. Демпферы, применяемые в Ф3Ц, средние или мягкие по жесткости, в 3Д жесткие или очень жесткие. Обычно оптимальные демпферы ставит производитель, а замена демферов кроме положительных изменений в стабилизации может вызвать и паразитные резонансы – раскачивание модели при слишком мягких демпферах, дрожание и вибрации при слишком жестких.
На фото мы видим рычаг шага лопасти с тремя установочными отверстиями для оси рычага-микшера шарнира Белла-Хиллера (сам рычаг-микшер снят):
А1 – отрицательная дельта (обычно для 3Д)
А2 – нулевая дельта (универсальная настройка)
А3 – положительная дельта (для Ф3Ц и для моделей копий)
Сервоось – «флайбар» и передаточное отношение
Сервоось или флайбар (flybar) – наш главный стабилизатор и … главный возмутитель! Да-да, ведь флайбар имеет две рабочих оси, где поперечная (ось качания) отвечает за самостабилизацию модели, а продольная (ось вращения севолопаток) за выполнение переворотов по крену (aileron, элерон) и тангажу (elevator, элеватор).
Нас интересует функция самостабилизации. Изобретение Белла, флайбар (flybar), самое эффективное механическое стабилизирующее устройство ротора модели вертолета. Да и в большой технике у роторов с малой заполняемостью и полужесткой подвеской обязательно применяется флайбар. Как же он работает? Вернемся к нашему летящему (или зависшему на ветру) вертолету. Вот он кренится под воздействием известных уже нам сил, ротор стремиться сохранить «горизонт», лопасти циклично совершают мах… но небольшой диаметр ротора и несвободная подвеска лопастей ограничивают эффективность маховой стабилизации. Но флайбар, шарнирно закрепленный перпендикулярно лопастям, тоже ведь за счет гироскопического момента сохраняет горизонтальное положение! При этом, поскольку между плоскостью флайбара и плоскостью ротора появляется угол, флайбар через рычаг-микшер (шарнир Бела-Хиллера) начинает воздействовать на рычаг шага лопасти и циклически изменять ее шаг противодействуя крену! Но ведь лопасти и флайбар расположены перпендикулярно, почему же тогда при крене лопасти компенсируют крен а не тангаж? Это одно из особых свойств аэродинамики ротора, оказывается, воздействие флайбара имеет задержку по фазе (фазинг) примерно на 90 градусов, поэтому и расположен он с лопастями под прямым углом. В некоторых моделях это может быть не прямой угол («примерно 90 град»), а например 84-86 град – он точно рассчитан и подобран на тестах.
Стабилизирующее воздействие флайбара в моделях Ф3Ц регулируется и настраивается двумя путями. Первый – подбор передачи (Bell-Hiller ratio). Установите шаг в ноль а флайбар в горизонт. Наклоните ось флайбара скажем на 20 градусов и померяйте насколько изменился угол лопасти. Если это будет 10 градусов, то коэффициент передачи или просто передача составит 2(лопасти)*А(угол лопасти) / В(угол флайбара) = 2*10/20 = 1. Значит передача равна 1. Теперь переставьте шарик короткой тяги флайбара в другое отверстие рычага-микшера. Пусть у нас выйдет при 20 градусах наклона оси флайбара 8 гадусов на лопасти, или передача 2*8/20=0,8. Мы видим, что в первом случае, наклон оси флайбара вызывал больший угол (больший отклик, реакцию) а значит большее воздействие лопасти для стабилизации положения модели, во втором же случае – меньшее. Таким образом можно просто настраивать эффект работы флайбара. Обычно для Ф3Ц вертолетов коэффициент передачи флайбара 0,9…1,1, для 3Д это 0,5…0,7. Мы можем смело начинать с универсальных 1,0, а затем переставляя шарики на рычаге-микшере (у Ф3Ц вертолетов обычно 3-4 варианта) подобрать необходимую нам устойчивость модели. При настройках надо помнить, что положение шариков определяет и величину общего шага (collective pitch) главных лопастей, и при некоторых установках уже может «не хватить» общего шага - настраивая передачу не забывайте проверять и шаг главного ротора!
Второй путь настройки – это изменение веса флайбара. Поскольку выдерживать «горизонт» флайбару позволяет гироскопический момент, то понятно – чем тяжелее этот гироскоп и чем выше его обороты – тем он стабильнее держит положение. Для загрузки и регулировки флайбара применяются небольшие грузики (flybar weights), которые надеты на его ось (справа и слева от головки ротора). Их можно двигать по оси флайбара (но только строго симметрично!) и крепить с помощью зажима болтом или цангой. Чем дальше грузики от центра, тем больше центробежная сила и гиро-эффект, тем лучше флайбар удерживает «горизонт» и стабилизирует модель. В большинстве Ф3Ц вертолетов грузики (а их вес тщательно подбирается производителем) находятся примерно посредине каждой половинки оси флайбара.
Настаиваем флайбар так. Для начала сдвинем грузики к ротору и установим-запрограммируем стабильные обороты ротора. Регулировки проводим при ровном ветре 2-4 м/с (это важно!). Взлетев на высоте 2 м, устанавливаем модель носом к ветру и, минимально корректируя, следим за ее поведением. Модель может сносить по ветру, это нормально, а вот движения-снос в бок, движение на ветер мы должны максимально устранить. Для этого сначала переставляем шарики на рычагах-микшерах и находим положение минимального дрейфа модели. Затем начинаем понемногу раздвигать грузики. Если грузики дошли до края флайбара, а вертолет продолжает дрейфовать, можно переставить рычаги-микшеры на рычагах шага – то есть установить положительную дельту. Если вертолет остается неустойчивым, тогда можно увеличить вес грузиков и/или поднять обороты ротора. Возможно придется поменять демпферы шпинделя лопастей на более мягкие чтобы облегчить мах лопасти (но слишком мягкие демпферы могут сделать вертолет склонным к резонансу-раскачиванию). Надо заметить, что у некоторых моделей флайбар работает излишне активно, и дрейф связан с «перекомпенсацией» флайбара – в этом случае передача должна быть уменьшена, а возможно придется даже установить отрицательную дельту.
Процесс таких настроек достаточно долог, но он очень важен! Результатом должно быть стабильное точное висение модели (возможно, с небольшим сносом по ветру) в любом положении – носом, боком, хвостом к ветру. Причем так должно быть во всем рабочем диапазоне оборотов главного ротора!
bigmir)net TOP 100
СТАТЬИ >
Моё F3C >
В прошлом веке ( ха-ха!) когда я поднял в небо свой первый 60-й двс вертолет, все следующие шаги освоения техники пилотирования были понятны и однозначны – висение, горизонтальный полет, простые пилотажные фигуры, комплекс Ф3Ц. Других спортивных классов просто не было… Прошло не так много времени, и теперь кажется что все поголовно летают только 3Д. Любой новичок, чуть повисев и полетав вокруг себя стремиться «крутнуть» что-нибудь этакое и заявить «я – 3Д пилот!». Наверное, засилье таких «пилотов» и возродило волну интереса к Ф3Ц – классическому, или даже академическому пилотированию, настоящей школе мастерства владения и управления моделью в каждой точке траектории маневра. Не удивляет меня и интерес опытных спортсменов 3Д-шников – ведь в соревнованиях Ф3Ц все пилоты летают единый обязательный комплекс, и субъективность оценки судей (и самооценки пилота!) в Ф3Ц сведена к минимуму.
Я постараюсь немного обобщить собственный опыт в этом классе. Не претендуя на «истину в последней инстанции», надеюсь просто помочь вновь пришедшим в Ф3Ц избежать традиционных ошибок.
Что такое FAI F3C?
F3C (Ф3Ц) – класс моделей радиоуправляемых вертолетов для соревнований по точному ( precision ) пилотированию.
В соревнованиях по Ф3Ц модель выполняет стандартный (утвержденный FAI – Международной Федерацией Авиаспорта) комплекс из 10-ти маневров, которые условно можно разделить на статические – маневры висения (такие маневры может выполнить только вертолет), и динамические – маневры в горизонтальном и вертикальном полете (такие маневры в основном корреспондируются с пилотажными маневрами самолетов).
Суть соревнований – точное, прецизионное выполнение всех маневров на разрешенной технике, в заданной последовательности и в заданное время. Все спортсмены выполняют единый, одинаковый комплекс. В первенствах мирового и континентального уровня после полетов стандартного комплекса 15-ть лучших пилотов соревнуются в финале по отдельному финальному комплексу.
Комплекс или комплексы фигур утверждаются ФАИ раз в 4 года. Соревнования чемпионатов мира и континента проводятся чередуясь раз в 2 года каждые.
Модель для Ф3Ц
Каким должен быть вертолет? Правила Ф3Ц четко описывают требования к модели для соревнований:
«…Разрешается фиксированный или регулируемый стабилизатор до 2% площади охваченной несущим ротором (роторами)…
…Площадь, которую охватывает несущий ротор не может превышать 250 дм2. ..
а) ВЕС: Вес модели (с топливом и батареями) не должен превышать 6,5 кг.
б) МОТОР: Максимальный рабочий объем поршневого двигателя:
15 см2 двухтактный,
20 см2 четырехтактный,
25 см2 только бензиновый.
Электрические двигатели ограничиваются максимальным (без нагрузки) напряжением 51 В для питания двигателя.
в) Гироскопы: … Использование электронных гироскопов ограничивается вращением вокруг оси отклонение от направления движения…
…Уровень звукового давления не должен превышать 87 dB (A) на мягкой (травяной) поверхности или 89 dB (A) на твердой (асфальт, цемент и т.д.) поверхности…»
В этом описании уже кроется ответ, ведь для стабильного, зрелищного и точного полета модель должна быть большой, мощной но экономичной (10 маневров, 6-10 минут полета!), тяжелой но без перегрузки ротора. А значит, мы должны использовать максимально эффективную силовую установку – 15 см3 нитро-двигатель или 12S электросистему, для таких моторов хороший ротор ок 200-210 дм2 и оптимальный полетный вес 6-6,3 кг.
Обращаю внимание – динамическая часть комплекса представляет из себя во многом «самолетный» полет, и здесь стабилизатор и киль необходимы. Поэтому у нашего Ф3Ц вертолета должен быть настоящий стабилизатор площадью ок 3-4 дм2 и соответственно настоящий киль.
Немаловажен внешний вид модели – ведь она должна быть легко различима и «читаема», а значит красивый аэродинамический фюзеляж подойдет в самый раз. Очень важно, что с таким фюзеляжем уровень шума ДВС значительно ниже допустимого, а ровный, «шелестящий» тембр мотора добавит позитивных впечатлений от полета.
Итак понятно - нам нужен большой (.90 или 700-й) вертолет, желательно в аэродинамическом фюзеляже. Но больших моделей производится немало, на что же обратить внимание?
Головка главного ротора
Наверное она в первую очередь и отличает Ф3Ц вертолеты. Поскольку в этом классе запрещены любые системы электронной стабилизации, то именно механическая система маховых движений лопасти и гироскопического эффекта самостабилизации сервооси с шарнирами Белла-Хиллера обеспечивает стабильный полет и точное управление. Наверное стоит отвлечься на шарнир Белла-Хиллера (Bell-Hiller). Это тот самый рычаг-качалка или рычаг-микшер, ось которого закреплена на рычаге шага цапфы лопасти. Шарнир Белла-Хиллера управляет шагом лопасти под воздействием внешнего управления-движения шайбы перекоса (это Белл), и под воздействием самостабилизирующего движения-качания сервооси (это Хиллер). Оба движения суммируются рычагом-качалкой и через рычаг шага изменяют положение лопасти.
Зачем нужна сложная система стабилизации модели вертолета? Представим себе летящий вертолет с вращающимся ротором (или, что физически одно и то же, вертолет, зависший на ветру). Наверное стоит напомнить, что при горизонтальном полете суммарная скорость протока воздуха (скорость полета плюс скорость вращения ротора) на набегающей лопасти будет больше, чем на убегающей. А значит, на набегающей лопасти подъемная сила будет больше, и вертолет должен «уйти на бочку»! Вот здесь и начинают работать наша точная механика головки, которая автоматически воздействует на лопасти циклически (периодически) уменьшая или увеличивая их шаг и восстанавливая - сохраняя положение модели.
Маховое движение лопасти, «дельта» и демпферы
Эта система стабилизации на моделях является важной, но не основной. Хотя заметим, что на больших вертолетах с многолопастными роторами для стабилизации полета достаточно только её. Но у нас размеры поменьше и только две лопасти на роторе.
Наш вертолет летит, и под действием образовавшейся неравной подъемной силы на разных лопастях начинает крениться. Ось лопастей ротора модели не прикреплена жестко главному валу (обычно она установлена на эластичных демпферах, или шарнире с демпферами), и поэтому за счет такого мягкого подвеса и мощного гироскопического эффекта ротора, ротор остается горизонтальным (при этом лопасти циклически-периодически поднимаются то вверх то вниз – это мах, взмахивание лопастей). И в этот момент начинает свою работу рычаг Белла – тяга, которая связывает лопасть с шайбой перекоса. В классическом случае, шарнир рычага лопасти находится не на перпендикуляре оси симметрии лопастей, а немного смещен к креплению «своей» лопасти – это и есть «положительная дельта» (positive delta). В этом случае, при крене модели и горизонтальном роторе автоматически будет уменьшаться шаг (и подъемная сила!) набегающей лопасти, а убегающей – увеличиваться. Такое изменение будет препятствовать крену и поможет удержать модель в горизонте. Для нашего небольшого ротора этот эффект стабилизации за счет такого махового движения совсем невелик, и в Ф3Ц часто шарнир рычага лопасти находится симметрично на перпендикуляре оси симметрии лопастей, это «нулевая дельта», и маховое движение лопасти не оказывает никакого стабилизирующего воздействия. А вот на некоторых 3Д моделях шарнир ставят впереди оси, что наоборот способствует крену – модель тогда будет очень резкой и неустойчивой. Надеюсь понятно, что говоря о положении шарнира, я имел ввиду, что рычаг шага лопасти расположен со стороны ее передней кромки. Если со стороны задней, то положительная и отрицательная дельты меняются. Посмотрите фото, поставьте перед собой свою модель и покачайте «качели» лопастей (шайба перекоса стоит неподвижно!) – и вы увидите описанные эффекты. Если в Вашей модели есть возможность установки дельты (дополнительные отверстия для крепления шарнира) – начнете с нейтральной, нулевой дельты. И если в процессе полетов не возможно будет добиться полной стабильности – можно будет попробовать и положительную дельту.
Поскольку межлопастная ось (shpindle, шпиндель) при махах лопастей наклоняется-качается в эластичных демпферах (damper), то конечно чем мягче такой демпфер, тем легче оси качаться и тем соответственно лучше работает самостабилизация. Демпферы, применяемые в Ф3Ц, средние или мягкие по жесткости, в 3Д жесткие или очень жесткие. Обычно оптимальные демпферы ставит производитель, а замена демферов кроме положительных изменений в стабилизации может вызвать и паразитные резонансы – раскачивание модели при слишком мягких демпферах, дрожание и вибрации при слишком жестких.
На фото мы видим рычаг шага лопасти с тремя установочными отверстиями для оси рычага-микшера шарнира Белла-Хиллера (сам рычаг-микшер снят):
А1 – отрицательная дельта (обычно для 3Д)
А2 – нулевая дельта (универсальная настройка)
А3 – положительная дельта (для Ф3Ц и для моделей копий)
Сервоось – «флайбар» и передаточное отношение
Сервоось или флайбар (flybar) – наш главный стабилизатор и … главный возмутитель! Да-да, ведь флайбар имеет две рабочих оси, где поперечная (ось качания) отвечает за самостабилизацию модели, а продольная (ось вращения севолопаток) за выполнение переворотов по крену (aileron, элерон) и тангажу (elevator, элеватор).
Нас интересует функция самостабилизации. Изобретение Белла, флайбар (flybar), самое эффективное механическое стабилизирующее устройство ротора модели вертолета. Да и в большой технике у роторов с малой заполняемостью и полужесткой подвеской обязательно применяется флайбар. Как же он работает? Вернемся к нашему летящему (или зависшему на ветру) вертолету. Вот он кренится под воздействием известных уже нам сил, ротор стремиться сохранить «горизонт», лопасти циклично совершают мах… но небольшой диаметр ротора и несвободная подвеска лопастей ограничивают эффективность маховой стабилизации. Но флайбар, шарнирно закрепленный перпендикулярно лопастям, тоже ведь за счет гироскопического момента сохраняет горизонтальное положение! При этом, поскольку между плоскостью флайбара и плоскостью ротора появляется угол, флайбар через рычаг-микшер (шарнир Бела-Хиллера) начинает воздействовать на рычаг шага лопасти и циклически изменять ее шаг противодействуя крену! Но ведь лопасти и флайбар расположены перпендикулярно, почему же тогда при крене лопасти компенсируют крен а не тангаж? Это одно из особых свойств аэродинамики ротора, оказывается, воздействие флайбара имеет задержку по фазе (фазинг) примерно на 90 градусов, поэтому и расположен он с лопастями под прямым углом. В некоторых моделях это может быть не прямой угол («примерно 90 град»), а например 84-86 град – он точно рассчитан и подобран на тестах.
Стабилизирующее воздействие флайбара в моделях Ф3Ц регулируется и настраивается двумя путями. Первый – подбор передачи (Bell-Hiller ratio). Установите шаг в ноль а флайбар в горизонт. Наклоните ось флайбара скажем на 20 градусов и померяйте насколько изменился угол лопасти. Если это будет 10 градусов, то коэффициент передачи или просто передача составит 2(лопасти)*А(угол лопасти) / В(угол флайбара) = 2*10/20 = 1. Значит передача равна 1. Теперь переставьте шарик короткой тяги флайбара в другое отверстие рычага-микшера. Пусть у нас выйдет при 20 градусах наклона оси флайбара 8 гадусов на лопасти, или передача 2*8/20=0,8. Мы видим, что в первом случае, наклон оси флайбара вызывал больший угол (больший отклик, реакцию) а значит большее воздействие лопасти для стабилизации положения модели, во втором же случае – меньшее. Таким образом можно просто настраивать эффект работы флайбара. Обычно для Ф3Ц вертолетов коэффициент передачи флайбара 0,9…1,1, для 3Д это 0,5…0,7. Мы можем смело начинать с универсальных 1,0, а затем переставляя шарики на рычаге-микшере (у Ф3Ц вертолетов обычно 3-4 варианта) подобрать необходимую нам устойчивость модели. При настройках надо помнить, что положение шариков определяет и величину общего шага (collective pitch) главных лопастей, и при некоторых установках уже может «не хватить» общего шага - настраивая передачу не забывайте проверять и шаг главного ротора!
Второй путь настройки – это изменение веса флайбара. Поскольку выдерживать «горизонт» флайбару позволяет гироскопический момент, то понятно – чем тяжелее этот гироскоп и чем выше его обороты – тем он стабильнее держит положение. Для загрузки и регулировки флайбара применяются небольшие грузики (flybar weights), которые надеты на его ось (справа и слева от головки ротора). Их можно двигать по оси флайбара (но только строго симметрично!) и крепить с помощью зажима болтом или цангой. Чем дальше грузики от центра, тем больше центробежная сила и гиро-эффект, тем лучше флайбар удерживает «горизонт» и стабилизирует модель. В большинстве Ф3Ц вертолетов грузики (а их вес тщательно подбирается производителем) находятся примерно посредине каждой половинки оси флайбара.
Настаиваем флайбар так. Для начала сдвинем грузики к ротору и установим-запрограммируем стабильные обороты ротора. Регулировки проводим при ровном ветре 2-4 м/с (это важно!). Взлетев на высоте 2 м, устанавливаем модель носом к ветру и, минимально корректируя, следим за ее поведением. Модель может сносить по ветру, это нормально, а вот движения-снос в бок, движение на ветер мы должны максимально устранить. Для этого сначала переставляем шарики на рычагах-микшерах и находим положение минимального дрейфа модели. Затем начинаем понемногу раздвигать грузики. Если грузики дошли до края флайбара, а вертолет продолжает дрейфовать, можно переставить рычаги-микшеры на рычагах шага – то есть установить положительную дельту. Если вертолет остается неустойчивым, тогда можно увеличить вес грузиков и/или поднять обороты ротора. Возможно придется поменять демпферы шпинделя лопастей на более мягкие чтобы облегчить мах лопасти (но слишком мягкие демпферы могут сделать вертолет склонным к резонансу-раскачиванию). Надо заметить, что у некоторых моделей флайбар работает излишне активно, и дрейф связан с «перекомпенсацией» флайбара – в этом случае передача должна быть уменьшена, а возможно придется даже установить отрицательную дельту.
Процесс таких настроек достаточно долог, но он очень важен! Результатом должно быть стабильное точное висение модели (возможно, с небольшим сносом по ветру) в любом положении – носом, боком, хвостом к ветру. Причем так должно быть во всем рабочем диапазоне оборотов главного ротора!
На фото мы видим рычаг-микшер (шарнир Белла-Хиллера) с четырьмя отверстиями для шариков.
В1-С1 – передача 1, средний шаг ротора (Ф3Ц)
В2-С2 – передача 1, небольшой шаг ротора
В1-С2 – передача >1, минимальный шаг ротора
В2-С1 – передача <1, максимальный шаг ротора (3Д)
Серволопатки, пичкомпенсатор – снова передача
Мы теперь знаем, что флайбар работает за счет гироскопического момента. Казалось бы, можно сделать его короче и с грузами на концах (как в больших двухлопастных вертолетах). Но нет – у нас относительно длинная сервоось с небольшими лопастями на концах (серволопатками), да еще и с возможностью продольного поворота – зачем? А затем, что на малых роторах с флайбарной системой стабилизации управление креном и тангажом только за счет циклического изменения шага ротора (cyclic pich, «циклик») очень неэффективно и инертно, и управляться наша модель будет вяло и с большой задержкой. В 1966 году немецкий инженер-авиамоделист Дитмар Шлюттер (Ditmar Schlutter) придумал удлинить сервоось и поставить поворотные лопатки (paddles, серволопатки) по ее концам – это изобретение, без преувеличения, стало основой всех будущих управляемых моделей вертолетов!
Работает система крайне просто – как только мы поворачиваем лопатки, они сразу создают наклон плоскости сервооси, выводя тем самым ее из равновесного самостабилизированного положения. Этот наклон флайбара немедленно через рычаг-микшер (шарнир Белл-Хиллер) изменяет циклический шаг так, что вертолет совершает переворот по крену (элерону) или тангажу (элеватору) пока вновь не будет достигнута самостабилизация. Если вы продолжаете удерживать лопатки повернутыми (держите ручку крена или тангажа) – модель будет вращаться-кувыркаться. Надеюсь, не надо объяснять, что чем больше площадь-размер серволопаток, их угол наклона, и чем длинее сервоось (плечо приложения их усилия) тем вертолет будет резче и активнее управляться.
Работая общим шагом (collective pitch) мы двигаем шайбу перекоса а вместе с ней и рычаги шага лопасти. Расстояние между шайбой и ротором меняется, и каким-то образом надо изменять и длину тяг флайбара. Поперечное качание флайбара в этом случае скомпенсировано рычагами-микшерами, а для компенсации его продольных наклонов есть пич-компенсатор (pitch-compensator). Это втулка свободно двигающаяся по валу и являющаяся местом крепления рычагов от шайбы к тягам поворота флайбара. Эти рычаги не симметричны, и имеют повышенную передачу – ведь они управляют небольшими серволопатками, и угол наклона серволопаток должен быть большим, значительно больше чем угол наклона шайбы.
Настройку серволопаток проводят проверяя реакции модели на команды крена и тангажа. Мы можем установить шарики в разные отверстия рычагов пич-компесатора, тем самым изменив угол наклона серволопаток и сделав вертолет резче или спокойнее по реакциям на управление. Если изменения угла не достаточно, тогда меняем лопатки – меньшие для более спокойной реакции, большие – для более резкой. Но не забываем, что разные лопатки имеют разный вес, что будет влиять на работу флайбара.
На фото изображен рычаг пич-компенсатора.
D1 – больший угол, резкая реакция
D2 – меньший угол, спокойная реакция
Шайба перекоса 90, 120 или 140/135 ?
Больше двух десятилетий система управления шайбой перекоса модели вертолета была неизменной – на каждую функцию работало отдельное серво, это так называемая система Хели 1 (Н1, Н1-90). То есть серво крена (элерон) наклоняло шайбу вправо-влево, серво тангажа (элеватор) наклоняло ее вперед назад. А вот механизм работы серво общего шага (а это должно быть очень мощное серво!) был несколько сложнее – двигать вверх-вниз шайбу можно было только через систему сложных рычагов (например модели Хиробо), или двигая площадку с установленными на ней сервами крена и тангажа (например ТТ Раптор), или качая коромысла с севами крена и тангажа (модели Роббе – Шлюттер). В целом, в плане кинематики Хели 1 наиболее точная система, но в плане простоты и стоимости она проигрывает.
Вся эта громоздкая система значительно упростилась с появлением программируемых микшеров в аппаратуре и точных серво. Такое радио «смешивает» и одновременно подает на серво команды крена-тангажа-шага, поэтому теперь за каждую функцию управления отвечает 2-3 серво.
Наиболее распространенная система Хели 3 – 120 град (Н3-120, HR3-120) на первый взгляд логична и понятна – все шарики/шарниры шайбы развернуты под одинаковыми углами 120 град. Но если внимательно посмотреть на ее работу, проверить равномерность движения шайбы перекоса и линейность наклона при тангаже, то окажется что шайба движется вверх-вниз покачиваясь, а наклоняясь еще и произвольно меняет общий шаг! Но почему? Посмотрите на модель с боку, и вы увидите что плечи (расстояние от оси вала до плоскости шариков шайбы) приложения усилия на шайбу разные. То есть, примерно, для обеспечения 5 град циклического шага тангажа (элеватор), серво тангажа должно отклониться на 10 град, а два боковых серво на 5 град. Наверное понятно, чтобы обеспечить такую точность микширования, радио должно иметь высокое разрешение, а серво работать как прецизионный механизм. Но при этом, поскольку у серво шайбы одинаковая (практически) скорость работы, то два серво на меньший угол 5 град, конечно же, отклоняться быстрее, чем серво тангажа на больший в 10 град – а значит произойдет непроизвольное движение шайбы и изменение общего шага!
Чтобы как то решить эту проблему, около 2000-го года пилот Кертис Янгблад придумал разместить все шарики на одинаковом плече приложения усилия – так появилась система «140 градусов» (примерный угол «развала» шариков крена и тангажа), или Хели 3 - 140 (Н3-140). Чуть позже фирма Хиробо придала этой системе геометрическую законченность, изменив угол на 135 град, появилась Хели 3 – 135 (Н3-135). Большого различия между «140» и «135» нет (немного отличается отработка по крену), а общее достоинство одно – совместно работающие пары и тройки серво при раздельных командах всегда откланяются на одинаковые углы!
Так что же выбрать? Динозавры вымерли, и кинематически совершенная но сложная система Н1 тоже вымирает как динозавр, наверное уже почти и не осталось вертолетов с Н1. Выбор Н3-120 оправдан, если вы на 101% уверены в точности, прецизионности своих серво и радио. Выбор же Н3-140/135 по моему мнению будет самым правильным. Многие производители предлагают сразу два варианта сборки модели – под 120 и 140 град, и это очень хороший вариант.
Схема и шайба перекоса системы Н3 – 120
Схема и шайба перекоса системы Н3–140
Привод шайбы – почему “Push-Pull”?
Классическая система привода шайбы через рычаг-коромысло (Push-Pull, «тяни-толкай») остается востребованной и в 3Д моделях. А в Ф3Ц это можно даже не обсуждать! Плюсы на лицо:
- жесткий рычаг-коромысло установлен на двух подшипниках и исключает деформации и смещения при работе привода управления
- подбор/изменение длины-плеча рычага привода тяги шайбы перекоса не требует смены качалок серво, а иногда и поиска качалок редкого (большого) размера
- симметричная нагрузка подшипника вала серво фактически вдвое снижает его износ
- простая механическая настройка положения шайбы без применения саб-триммеров
- конструктивное и компоновочное удобство механики вертолета
- зачастую рычаг-коромысло спасает редуктор серво при авариях
Минусы, а именно вес и небольшое усложнение конструкции можно пропустить – так как мы говорим о изначально не легкой и не простой модели.
Привод хвоста - ремень или вал?
Вот уж что дело вкуса и собственных предпочтений – это ремень или вал на хвост!
Простая, мягкая в работе ременная передача имеет дополнительные механические потери (что бывает заметно на авторотациях), хотя авторотации на больших моделях вертолетов (с большим, тяжелым ротором - считай маховиком) выполняются достаточно легко и с ременным хвостом.
Сложная, но точная и жесткая карданная передача, конечно же, немного четче в управлении и экономичнее при авторотациях. Но, малейшее касание земли хвостом – и меняем шестеренки! Да и зазор в «коничках» выставить часто оказывается совсем не просто.
Авторотации в Ф3Ц используются постоянно (каждый полет!). И, наверное, пилотам с не очень большим опытом лучше подойдет ремень – как значительно более живучий привод при мелких неудачах.
Так какой же вертолет покупать?
Это уж выбирайте сами, я рассказал только о том, на что стоит обратить внимание. Единственно, я бы не стал увлекаться моделями фирм-новичков в Ф3Ц. Класс Ф3Ц весьма консервативен, и традиции и опыт в проектировании моделей Ф3Ц имеют колоссальное значение. Посмотрите внимательно на технику известных производителей Ф3Ц, посмотрите, на чем летают мировые пилоты (например, HIROBO Eagle и Freya, JR Sylphide и Airskipper, CY Rave ENV…). Ну и конечно оцените свой бюджет и возможности в эксплуатации и ремонте.
Взято: http://rcheli.com.ua [rcheli.com.ua]
Счастлив тот кто не врёт, кто придуманным живёт
Офлайн
#12 Дек. 8, 2012 11:37:07
- CAMELION
-
-
- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5864
- Репутация:
12
- Профиль Отправить e-mail
Если вы новичёк или как настроить вертолёт!
Калькулятор для вертолётов электричек
Для удобства расчета и подбора комплетации электровертолетов существует несколько распространенных расчетных программ.
Наш новый калькулятор достаточно точно и с учетом эффективности батарей и моторов расчитывает параметры оборотов ротора, мощности и динамики модели. Он выпонен в виде простого табличного редактора .XLS или .XLSX и легко устанавливается даже в мобильный телефон.
Пользоваться программой очень просто: распаковать архив и сохранить нужный табличный файл (в зависмости от версии MS Excel). Запустить файл, в белое поле таблицы ввести свои данные (в примере видно в какой размерности и формате) - расчет произойдет автоматически. Файл со своими расчетами можно сохранить.
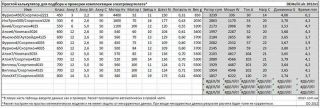
Взято: http://rcheli.com.ua [rcheli.com.ua]
Счастлив тот кто не врёт, кто придуманным живёт
Для удобства расчета и подбора комплетации электровертолетов существует несколько распространенных расчетных программ.
Наш новый калькулятор достаточно точно и с учетом эффективности батарей и моторов расчитывает параметры оборотов ротора, мощности и динамики модели. Он выпонен в виде простого табличного редактора .XLS или .XLSX и легко устанавливается даже в мобильный телефон.
Пользоваться программой очень просто: распаковать архив и сохранить нужный табличный файл (в зависмости от версии MS Excel). Запустить файл, в белое поле таблицы ввести свои данные (в примере видно в какой размерности и формате) - расчет произойдет автоматически. Файл со своими расчетами можно сохранить.
Взято: http://rcheli.com.ua [rcheli.com.ua]
Файл: DDHeliPeakCalc2012_13.rar 13.2 KБ
Счастлив тот кто не врёт, кто придуманным живёт
Офлайн
#13 Дек. 8, 2012 11:46:50
- CAMELION
-
-
- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5864
- Репутация:
12
- Профиль Отправить e-mail
Если вы новичёк или как настроить вертолёт!
Настройка нитродвигателя
Автор: Mike Velez
RC Heli Magazine, Выпуск 2 (Декабрь/Январь 2006)
Оригинальный текст: http://www.rchelimag.com/pages/howto.php?howto=2&page=5 [rchelimag.com]
Перевод: Андрей Пащенко
Перевод и публикация выполнены с разрешения редакции журнала RC Heli Magazine
Постепенно современные двухтактные нитродвигатели становились все более и более надежными, но их настройка до сих пор требует времени, терпения и практики. В этой статье мы рассмотрим основы настройки вертолетного двигателя для достижения максимальной производительности и надежной работы. И не забывайте, практика – путь к совершенству!
Прежде чем начать…
Правильная обкатка двигателя – это ключ к длительной надежной работе двигателя. Обкатка двигателя достаточно нетривиальный процесс, поэтому в рамках данной статьи мы предполагаем, что ваш двигатель уже прошел правильную обкатку. Также никогда не забывайте общих правил безопасности во время настройки вашего вертолета.
Бедная, богатая или в самый раз
Перед началом настройки двигателя вам необходимо знать, что в зависимости от состава топливной смести, двигатель может работать в трех режимах. Давайте кратко ознакомимся с этими режимами.
Бедная смесь. В этом режиме в соотношении количества топлива и воздуха существенно больше воздуха. Это означает, что в смести поступающей в двигатель недостаточно топлива. В этом режиме двигатель постоянно перегревается из-за недостатка смазки. Вы можете определить, когда двигатель работает на бедной смести по небольшому количеству выхлопных газов, а также жесткому звуку работы двигателя сопровождающегося хлопающими звуками. Другим признаком является то, что при уменьшении газа, обороты двигателя не падают.
Богатая смесь. Как нетрудно догадаться, богатая смесь диаметрально противоположна бедной смеси. В двигатель, работающий на богатой смеси, поступает относительно много топлива, по сравнению с воздухом. Работа в этом режиме не так опасна для двигателя, однако двигатель не развивает полной мощности и может заглохнуть. Вы можете определить, что двигатель работает на богатой смести по большому количеству выхлопных газов и/или масла (топлива) выходящих из глушителя, запаздывании отклика на увеличение газа и звук работы двигателя никогда не будет казаться монотонным.
В самый раз. Где-то между богатой и бедной топливными смесями находится «то что нужно». Это тот режим, на который вам необходимо настроить двигатель. Работа двигателя на правильной топливной смести характеризуется умеренным количеством выхлопных газов, звук работы двигателя ровный, а в ответ на увеличение газа двигатель плавно набирает обороты.

(слева направо) 1. очень бедная; 2. очень богатая; 3. оптимально.
С чего начать…
К вашему двигателю прилагается инструкция, в которой описаны шаги по базовой настройке карбюратора. Поэтому знакомство с инструкцией, никогда не помешает. Эти настройки являются отправной точкой независимо от таких факторов как топливо, тип свечи зажигания, погодные условия.
Познакомимся с карбюратором
В большинстве карбюраторов имеются две иглы для настройки игла высоких оборотов и игла низких оборотов. Игла высоких оборотов – определяет общее количество топлива поступающее в двигатель в рабочем диапазоне. Игла низких оборотов регулирует объем топлива на холостом ходу и низких оборотах. Некоторые двигатели оборудованы иглой для регулировки топливной смеси на средних оборотах. В рамках данной статьи мы остановимся только на регулировке игл высоких и низких оборотов.

Щипковый тест
После запуска, дайте прогреться двигателю несколько минут на холостых оборотах до достижения рабочей температуры. Попытки настроить непрогретый двигатель – пустая трата времени, т.к. работа двигателя зависит от температуры. После нескольких минут работы кратковременно увеличьте газ, для подачи топлива в двигатель и после возврата двигателя в режим холостого хода пережмите трубку подачи топлива. Если двигатель заглохнет через несколько секунд, то смесь слишком бедная и вам необходимо ее обогатить, немного отвернув иглу низких оборотов. Если двигатель продолжает работать более нескольких секунд, то смесь слишком богатая и вам необходимо обеднить смесь немного закрутив иглу низких оборотов. При нормальном составе смести двигатель должен проработать 2 секунды, затем обороты должны чуть увеличиться после чего двигатель заглохнет. Повторяйте щипковый тест до тех пор, пока не добьетесь желаемых результатов.

Настройка полетного режима
Висение. После того как двигатель перестанет глохнуть на холостых оборотах и вы удовлетворены настройкой карбюратора, необходимо взлететь и зависнуть. Смотрите, слушайте и пытайтесь определить на какой смеси работает двигатель: на богатой или бедной. Если в двигатель поступает обедненная смесь, то обогатите ее путем поворота против часовой стрелки иглы высоких оборотов на два щелчка. Если смесь, наоборот, является слишком богатой - несколько обедните смесь, повернув иглу высоких оборотов по часовой стрелке. После того как будут выявлены адекватные настройки, можно переходить к взлету.
Взлет. Если двигатель хорошо работает на холостых оборотах и во время висения, то самое время перейти к взлету. Во время висения резко увеличьте газ почти до максимума и понаблюдайте за реакцией двигателя. Если будут отмечаться перебои в работе или много выхлопных газов, то в этом случае возможно смесь все еще слишком богатая и вам необходимо ее немного обеднить с помощью иглы высоких оборотов. Если вертолет резко начнет набирать высоту, выхлопные газы будут практически отсутствовать или звук двигателя будет хлопающим, то вероятно смесь слишком бедная и вам необходимо ее немного обогатить. Как и на предыдущем шаге повторяйте данный тест до тех пор, пока вы не найдете правильные настройки.
Повторный щипковый тест. Т.к. игла низких оборотов имеет влияние на весь диапазон работы двигателя, то после проведенных настроек необходимо повторить данный тест.
Условия. Методика настройки, описанная выше, не зависит от условий работы двигатель, хотя вам необходимо учитывать температуру окружающего воздуха и влажность. Во время каждого цикла, в двигатель поступает объем воздуха, содержащий определенное количество молекул кислорода. Кислород необходим для работы вашего двигателя. При высокой влажности в том же объеме воздуха содержится меньше кислорода, и необходимо будет немного обеднить смесь. При пониженной влажности, содержание кислорода в единице объема воздуха повышается, и необходимо обогатить смесь, для достижения оптимального соотношения количества топлива и воздуха (кислорода). Температура также влияет на работу двигателя, но ее влияние меньше по сравнению с влажностью. При повышении температуры окружающего воздуха воздух становится более разряженным, что означает меньшее содержание кислорода в единице объема. Следовательно вам необходимо провести те же настройки что и при повышении влажности.
Заключение
Настройки двигателя не является точной наукой, но если у вас есть терпение и достаточно практики, то вы сможете настроить двигатель для любых условий. Если во время полетов вы заметите изменение атмосферных условий, или вам покажется, что настройки двигателя не соответствуют им, проведите коррекцию и продолжайте получать удовольствие от полетов.
Счастлив тот кто не врёт, кто придуманным живёт
Автор: Mike Velez
RC Heli Magazine, Выпуск 2 (Декабрь/Январь 2006)
Оригинальный текст: http://www.rchelimag.com/pages/howto.php?howto=2&page=5 [rchelimag.com]
Перевод: Андрей Пащенко
Перевод и публикация выполнены с разрешения редакции журнала RC Heli Magazine
Постепенно современные двухтактные нитродвигатели становились все более и более надежными, но их настройка до сих пор требует времени, терпения и практики. В этой статье мы рассмотрим основы настройки вертолетного двигателя для достижения максимальной производительности и надежной работы. И не забывайте, практика – путь к совершенству!
Прежде чем начать…
Правильная обкатка двигателя – это ключ к длительной надежной работе двигателя. Обкатка двигателя достаточно нетривиальный процесс, поэтому в рамках данной статьи мы предполагаем, что ваш двигатель уже прошел правильную обкатку. Также никогда не забывайте общих правил безопасности во время настройки вашего вертолета.
Бедная, богатая или в самый раз
Перед началом настройки двигателя вам необходимо знать, что в зависимости от состава топливной смести, двигатель может работать в трех режимах. Давайте кратко ознакомимся с этими режимами.
Бедная смесь. В этом режиме в соотношении количества топлива и воздуха существенно больше воздуха. Это означает, что в смести поступающей в двигатель недостаточно топлива. В этом режиме двигатель постоянно перегревается из-за недостатка смазки. Вы можете определить, когда двигатель работает на бедной смести по небольшому количеству выхлопных газов, а также жесткому звуку работы двигателя сопровождающегося хлопающими звуками. Другим признаком является то, что при уменьшении газа, обороты двигателя не падают.
Богатая смесь. Как нетрудно догадаться, богатая смесь диаметрально противоположна бедной смеси. В двигатель, работающий на богатой смеси, поступает относительно много топлива, по сравнению с воздухом. Работа в этом режиме не так опасна для двигателя, однако двигатель не развивает полной мощности и может заглохнуть. Вы можете определить, что двигатель работает на богатой смести по большому количеству выхлопных газов и/или масла (топлива) выходящих из глушителя, запаздывании отклика на увеличение газа и звук работы двигателя никогда не будет казаться монотонным.
В самый раз. Где-то между богатой и бедной топливными смесями находится «то что нужно». Это тот режим, на который вам необходимо настроить двигатель. Работа двигателя на правильной топливной смести характеризуется умеренным количеством выхлопных газов, звук работы двигателя ровный, а в ответ на увеличение газа двигатель плавно набирает обороты.
(слева направо) 1. очень бедная; 2. очень богатая; 3. оптимально.
С чего начать…
К вашему двигателю прилагается инструкция, в которой описаны шаги по базовой настройке карбюратора. Поэтому знакомство с инструкцией, никогда не помешает. Эти настройки являются отправной точкой независимо от таких факторов как топливо, тип свечи зажигания, погодные условия.
Познакомимся с карбюратором
В большинстве карбюраторов имеются две иглы для настройки игла высоких оборотов и игла низких оборотов. Игла высоких оборотов – определяет общее количество топлива поступающее в двигатель в рабочем диапазоне. Игла низких оборотов регулирует объем топлива на холостом ходу и низких оборотах. Некоторые двигатели оборудованы иглой для регулировки топливной смеси на средних оборотах. В рамках данной статьи мы остановимся только на регулировке игл высоких и низких оборотов.
Щипковый тест
После запуска, дайте прогреться двигателю несколько минут на холостых оборотах до достижения рабочей температуры. Попытки настроить непрогретый двигатель – пустая трата времени, т.к. работа двигателя зависит от температуры. После нескольких минут работы кратковременно увеличьте газ, для подачи топлива в двигатель и после возврата двигателя в режим холостого хода пережмите трубку подачи топлива. Если двигатель заглохнет через несколько секунд, то смесь слишком бедная и вам необходимо ее обогатить, немного отвернув иглу низких оборотов. Если двигатель продолжает работать более нескольких секунд, то смесь слишком богатая и вам необходимо обеднить смесь немного закрутив иглу низких оборотов. При нормальном составе смести двигатель должен проработать 2 секунды, затем обороты должны чуть увеличиться после чего двигатель заглохнет. Повторяйте щипковый тест до тех пор, пока не добьетесь желаемых результатов.
Настройка полетного режима
Висение. После того как двигатель перестанет глохнуть на холостых оборотах и вы удовлетворены настройкой карбюратора, необходимо взлететь и зависнуть. Смотрите, слушайте и пытайтесь определить на какой смеси работает двигатель: на богатой или бедной. Если в двигатель поступает обедненная смесь, то обогатите ее путем поворота против часовой стрелки иглы высоких оборотов на два щелчка. Если смесь, наоборот, является слишком богатой - несколько обедните смесь, повернув иглу высоких оборотов по часовой стрелке. После того как будут выявлены адекватные настройки, можно переходить к взлету.
Взлет. Если двигатель хорошо работает на холостых оборотах и во время висения, то самое время перейти к взлету. Во время висения резко увеличьте газ почти до максимума и понаблюдайте за реакцией двигателя. Если будут отмечаться перебои в работе или много выхлопных газов, то в этом случае возможно смесь все еще слишком богатая и вам необходимо ее немного обеднить с помощью иглы высоких оборотов. Если вертолет резко начнет набирать высоту, выхлопные газы будут практически отсутствовать или звук двигателя будет хлопающим, то вероятно смесь слишком бедная и вам необходимо ее немного обогатить. Как и на предыдущем шаге повторяйте данный тест до тех пор, пока вы не найдете правильные настройки.
Повторный щипковый тест. Т.к. игла низких оборотов имеет влияние на весь диапазон работы двигателя, то после проведенных настроек необходимо повторить данный тест.
Условия. Методика настройки, описанная выше, не зависит от условий работы двигатель, хотя вам необходимо учитывать температуру окружающего воздуха и влажность. Во время каждого цикла, в двигатель поступает объем воздуха, содержащий определенное количество молекул кислорода. Кислород необходим для работы вашего двигателя. При высокой влажности в том же объеме воздуха содержится меньше кислорода, и необходимо будет немного обеднить смесь. При пониженной влажности, содержание кислорода в единице объема воздуха повышается, и необходимо обогатить смесь, для достижения оптимального соотношения количества топлива и воздуха (кислорода). Температура также влияет на работу двигателя, но ее влияние меньше по сравнению с влажностью. При повышении температуры окружающего воздуха воздух становится более разряженным, что означает меньшее содержание кислорода в единице объема. Следовательно вам необходимо провести те же настройки что и при повышении влажности.
Заключение
Настройки двигателя не является точной наукой, но если у вас есть терпение и достаточно практики, то вы сможете настроить двигатель для любых условий. Если во время полетов вы заметите изменение атмосферных условий, или вам покажется, что настройки двигателя не соответствуют им, проведите коррекцию и продолжайте получать удовольствие от полетов.
Счастлив тот кто не врёт, кто придуманным живёт
Офлайн
#14 Фев. 18, 2013 08:50:57
- CAMELION
-
-
- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5864
- Репутация:
12
- Профиль Отправить e-mail
Если вы новичёк или как настроить вертолёт!
Сайт по техническим пораметрам сервомашинок: http://www.servodatabase.com/servos/all [servodatabase.com]
Счастлив тот кто не врёт, кто придуманным живёт
Счастлив тот кто не врёт, кто придуманным живёт
Офлайн
#15 Июль 26, 2013 14:42:05
- CAMELION
-
-
- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5864
- Репутация:
12
- Профиль Отправить e-mail
Если вы новичёк или как настроить вертолёт!
Лопасти для бесфлайбарного вертолета.
Последнее время в кругах моделистов-вертолетчиков все чаще слышны обсуждения бесфлайбарных систем (FBL). Такие системы уже достаточно давно представлены на рынке и закономерно, что разработчики лопастей, такие как Edge, Curtis Youngblood и другие, исследуют возможность улучшения характеристик работы FBL систем с помощью специальных лопастей. Это вовсе не означает, что бесфлайбарные системы не работают с обычными лопастями, но специальные лопасти могут оказать положительное влияние на летные характеристики вертолета. Если ваша модель постоянно требует триммирования, на маневрах совершает нежелательные движения, а на высокой скорости “козлит”, то применение специальных лопастей может уменьшить или полностью исключить эти проявления. В этой статье мы рассмотрим особенности конструкции бесфлайбарных лопастей, чтобы вы могли определить, нужно вам менять лопасти или нет.
Разница между системами с флайбаром и без него.
Прежде чем перейти к рассмотрению лопастей стоит уделить внимание принципиальным отличиям работы систем с флайбаром и без него. Задача системы стабилизации вертолета состоит в том, чтобы сохранить направление движения и ориентацию модели в любых режимах полета до тех пор, пока пилот не даст команду на изменение курса. Если отпустить стики в любой момент в любом положении вертолета, будь то положение на ноже, в инверте или полет на высокой скорости - модель должна сохранить последнюю ориентацию и направление полета. Во время маневров система стабилизации должна удерживать вертолет от вращения вокруг любой оси кроме той или тех, по которым приходят команды от пилота.

Размер лопаток, их профиль, вес, длина флайбара и отношения миксеров определяют степень стабилизации механической системы.
В случае с флайбаром фиксация ориентации происходит благодаря непрерывному управляющему воздействию от флайбара, обладающего стабильностью благодаря гироскопическому эффекту. Любое внешнее возмущение, например, порыв ветра, будет в определенной степени скомпенсирован флайбаром. Когда пилот желает совершить маневр, управляющее воздействие от сервоприводов заставит флайбар занять новую плоскость вращения и следом за флайбаром последует вертолет, при этом вертолет сохранит ориентацию по другим осям, кроме той, по которой сейчас выполняется маневр.
Во время полета вперед на высокой скорости асимметрия подъемной силы приводит к тому, что вертолет задирает нос и замедляется. Флайбар самостоятельно ориентирует себя к относительному потоку (см. статью про теорию авторотации) и тем самым заставляет ротор постоянно наклоняться вперед без дополнительного управления от стиков. Стабилизирующее управление от флайбара происходит постоянно и без задержек. Регулировка степени стабилизации флайбара производится с помощью изменения веса лопаток, их площади, длины флайбара и пропорции миксеров ротора.
У бесфлайбарной системы задача та же, что и у флайбара - сохранить ориентацию вертолета. В отличии от механического флайбара бесфлайбарная система использует новейшие гироскопы, электронику и изощренные алгоритмы управления.

В бесфлайбарной системе настройка электроники определяет летные характеристики.
Датчики, программное обеспечение и характеристики сервоприводов определяют качество работы системы. Стоит отметить, что несмотря на то, что у FBL систем есть масса преимуществ, они заставляют сервоприводы работать более активно. Вертолеты с флайбаром используют флайбар для стабилизации и сервоприводы для управления. FBL системы используют сервоприводы и для того и для другого, поэтому нагрузка на сервоприводы становится решающим фактором и может повлиять на качество работы FBL системы.
Лопасти по назначению
Различие между флайбарными и бесфлайбарными лопастями.
Мне посчастливилось обсудить конструкцию FBL лопастей с автором лопастей Radix, чемпионом Мира Кертисом Янгбладом. Я спросил Кертиса - в чем ключевое отличие летных характеристик FBL лопастей. Он объяснил, что ФБЛ лопасти обладают дополнительной гироскопической стабильностью и они менее агрессивные. Обычно лопасть более стабильна, если имеет центр тяжести смещенный к кончику лопасти. Груз, смещенный к внешнему радиусу, увеличивает гироскопическую стабильность диска ротора. (в дополнение к этому смещение груза к кончику увеличивает инерционность ротора и позволяет запасать больше энергии для авторотации).

Сравнение продольного ЦТ агрессивной лопасти (сверху) и стабильной (снизу).
Более агрессивная лопасть имеет тенденцию к увеличению шага (назовем этот термин подрыв, подрывистая лопасть), помогая сервоприводам, когда шаг увеличивается и препятствуя им, когда шаг уменьшается к нулю. Неагрессивная лопасть стремится занять положение нулевого шага и оказывает сопротивление сервоприводам при маневрировании. Агрессивность лопасти определяется многими факторами, включая форму профиля, хорду и толщину.
Из всех характеристик лопасти только один параметр напрямую влияет на агрессивность: расположение центра давления относительно оси изменения шага. Центр давления это зона, из которой будет действовать подъемная сила, если ее всю стянуть в одну точку. Если центр давления находится перед осью изменения шага, то он создаст момент вокруг этой оси. Момент будет помогать сервоприводам увеличивать шаг лопасти и препятствовать сервоприводам уменьшать шаг. С такими лопастями ротор становится “подрывным” по шагам. Флаттер (треск от срыва потока) - это признак агрессивных лопастей и он часто приводит к чрезмерному изгибанию лопастей и повышенному износу наконечников линков. Если центр давления расположен позади оси изменения шага, то получается обратная ситуация - момент помогает сервоприводам вернуть лопасть к нулевому шагу.
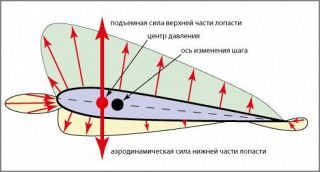
Центр давления, расположенный впереди относительно оси изменения шага, стремится увеличит шаг лопасти. Перемещение центра давления назад относительно оси изменения шага приводит к появлению момента, уменьшающего шаг лопасти.
Расположение центра давления относительно оси изменения шага в большей степени определяется балансом лопасти относительно крепежного отверстия в комле. Если подвесить лопасть за крепежное отверстие и дать свободно свисать вниз, то по отклонению лопасти от вертикали можно судить о расположении центра давления. Если лопасть отклоняется в сторону наступающей кромки, то центр давления впереди, если отклоняется в сторону отступающей кромки, то центр давления сзади. Из всех сил, действующих на лопасть во время вращения, преобладает центробежная сила, которая расправляет лопасти и приводит к тому, что центр давления занимает положение, обнаруженное во время статического теста с подвешиванием лопасти.
FBL лопасти конструируются с тяжелой наступающей кромкой, которая отклоняет лопасть в сторону отступающей кромки, поэтому в статичном тесте FBL лопасти не выступают вперед и даже немного отклоняются назад.

Подвешенная за крепежное отверстие, лопасть отклоняется вперед, если она более агрессивна (слева), и назад, если менее агрессивна (справа).
Если бы центробежная сила была единственной силой, действующей на лопасть, было бы очень просто определить положение центра давления относительно оси изменения шага. Но сила сопротивления и приводящая сила авторотации, действуя на лопасть, приводят к опережению и отставанию. Во время работы шагом сила сопротивления приводит к отставанию лопасти, что в свою очередь смещает центр давления назад. Во время авторотации приводящая сила немного смещает лопасть вперед. Изменение положения центра давления приводит к постоянному изменению нагрузки на сервоприводы.
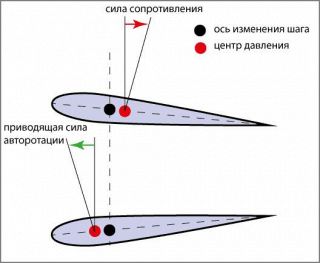
Во время полета под тягой (сверху) сила сопротивления смещает центр давления назад относительно оси изменения шага. Во время авторотации (снизу) приводящая сила двигает лопасть вперед относительно оси изменения шага. Точное положение не совсем совпадает с приведенным на рисунке. Рисунок показывает относительное перемещение.
В работе лопастей и в определении положения центра давления слишком много переменных. Кертис прошел длинный путь проб и ошибок, подбирая характеристики лопастей для каждого конкретного применения. В настоящее время на рынке доступны 4 типа лопастей Radix: FAI, FBL, Стандартные и SB (Stick Banger). В порядке увеличения агрессивности: FAI лопасти самые стабильные, SB самые агрессивные. Для FAI полета нужны более стабильные лопасти, которые позволяют минимизировать влияние внешних воздействий и тем самым уменьшают необходимость в подруливании. Совсем другое дело – 3D полет на флайбарном вертолете. Лопасти Radix SB дают наиболее быстрый отклик на управление для флайбарного вертолета. В случае с FBL вертолетом более стабильные FBL лопасти никак не ограничивают маневренность, напротив, позволяют улучшить характеристики управления.
Лопасти Radix FBL имеют более высокую гироскопическую стабильность и сниженную агрессивность, которые позволяют получить более предсказуемую нагрузку на сервоприводы во время полета. Центр давления не расположен слишком далеко впереди, чтобы не создавать флаттер и излишнюю нагрузку на сервоприводы, Но также центр давления не находится слишком далеко сзади, иначе ротор будет слишком медленно реагировать на управление. Лопасти разработаны с тем расчетом, чтобы оказывать как можно меньше влияния на работу FBL системы.
Заключение
Надеюсь, что после прочтения этой статьи вы поймете, что в FBL лопастях нет ничего магического. Это всего лишь еще одна возможность тонкой настройки работы системы. Возможно те лопасти, что у вас уже есть, дают достаточный уровень стабильности и агрессивности для работы FBL системы. Прежде чем покупать FBL лопасти, убедитесь, что лопасти, которые у вас уже есть, точно не обладают требуемыми характеристиками. Проверьте как лопасти ведут себя, будучи подвешенными за крепежное отверстие, где расположен продольный центр тяжести по отношению к тем лопастям, которые вы хотите приобрести. Если вы обнаружите, что ваши лопасти уже обладают характеристиками, подходящими для FBL системы, то лучше попробуйте провести дополнительную настройку системы стабилизации. Если вы уверены, что используете нестабильные лопасти с агрессивным характером, и система стабилизации вынуждена “сражаться” с ними, чтобы поддержать ориентацию и прямолинейность движения модели, то попробуйте специальные FBL лопасти. Вероятнее всего они помогут.
Автор: Арт Корал
Статья опубликована в RCHeli Январь 2011
Счастлив тот кто не врёт, кто придуманным живёт
Последнее время в кругах моделистов-вертолетчиков все чаще слышны обсуждения бесфлайбарных систем (FBL). Такие системы уже достаточно давно представлены на рынке и закономерно, что разработчики лопастей, такие как Edge, Curtis Youngblood и другие, исследуют возможность улучшения характеристик работы FBL систем с помощью специальных лопастей. Это вовсе не означает, что бесфлайбарные системы не работают с обычными лопастями, но специальные лопасти могут оказать положительное влияние на летные характеристики вертолета. Если ваша модель постоянно требует триммирования, на маневрах совершает нежелательные движения, а на высокой скорости “козлит”, то применение специальных лопастей может уменьшить или полностью исключить эти проявления. В этой статье мы рассмотрим особенности конструкции бесфлайбарных лопастей, чтобы вы могли определить, нужно вам менять лопасти или нет.
Разница между системами с флайбаром и без него.
Прежде чем перейти к рассмотрению лопастей стоит уделить внимание принципиальным отличиям работы систем с флайбаром и без него. Задача системы стабилизации вертолета состоит в том, чтобы сохранить направление движения и ориентацию модели в любых режимах полета до тех пор, пока пилот не даст команду на изменение курса. Если отпустить стики в любой момент в любом положении вертолета, будь то положение на ноже, в инверте или полет на высокой скорости - модель должна сохранить последнюю ориентацию и направление полета. Во время маневров система стабилизации должна удерживать вертолет от вращения вокруг любой оси кроме той или тех, по которым приходят команды от пилота.
Размер лопаток, их профиль, вес, длина флайбара и отношения миксеров определяют степень стабилизации механической системы.
В случае с флайбаром фиксация ориентации происходит благодаря непрерывному управляющему воздействию от флайбара, обладающего стабильностью благодаря гироскопическому эффекту. Любое внешнее возмущение, например, порыв ветра, будет в определенной степени скомпенсирован флайбаром. Когда пилот желает совершить маневр, управляющее воздействие от сервоприводов заставит флайбар занять новую плоскость вращения и следом за флайбаром последует вертолет, при этом вертолет сохранит ориентацию по другим осям, кроме той, по которой сейчас выполняется маневр.
Во время полета вперед на высокой скорости асимметрия подъемной силы приводит к тому, что вертолет задирает нос и замедляется. Флайбар самостоятельно ориентирует себя к относительному потоку (см. статью про теорию авторотации) и тем самым заставляет ротор постоянно наклоняться вперед без дополнительного управления от стиков. Стабилизирующее управление от флайбара происходит постоянно и без задержек. Регулировка степени стабилизации флайбара производится с помощью изменения веса лопаток, их площади, длины флайбара и пропорции миксеров ротора.
У бесфлайбарной системы задача та же, что и у флайбара - сохранить ориентацию вертолета. В отличии от механического флайбара бесфлайбарная система использует новейшие гироскопы, электронику и изощренные алгоритмы управления.
В бесфлайбарной системе настройка электроники определяет летные характеристики.
Датчики, программное обеспечение и характеристики сервоприводов определяют качество работы системы. Стоит отметить, что несмотря на то, что у FBL систем есть масса преимуществ, они заставляют сервоприводы работать более активно. Вертолеты с флайбаром используют флайбар для стабилизации и сервоприводы для управления. FBL системы используют сервоприводы и для того и для другого, поэтому нагрузка на сервоприводы становится решающим фактором и может повлиять на качество работы FBL системы.
Лопасти по назначению
Различие между флайбарными и бесфлайбарными лопастями.
Мне посчастливилось обсудить конструкцию FBL лопастей с автором лопастей Radix, чемпионом Мира Кертисом Янгбладом. Я спросил Кертиса - в чем ключевое отличие летных характеристик FBL лопастей. Он объяснил, что ФБЛ лопасти обладают дополнительной гироскопической стабильностью и они менее агрессивные. Обычно лопасть более стабильна, если имеет центр тяжести смещенный к кончику лопасти. Груз, смещенный к внешнему радиусу, увеличивает гироскопическую стабильность диска ротора. (в дополнение к этому смещение груза к кончику увеличивает инерционность ротора и позволяет запасать больше энергии для авторотации).
Сравнение продольного ЦТ агрессивной лопасти (сверху) и стабильной (снизу).
Более агрессивная лопасть имеет тенденцию к увеличению шага (назовем этот термин подрыв, подрывистая лопасть), помогая сервоприводам, когда шаг увеличивается и препятствуя им, когда шаг уменьшается к нулю. Неагрессивная лопасть стремится занять положение нулевого шага и оказывает сопротивление сервоприводам при маневрировании. Агрессивность лопасти определяется многими факторами, включая форму профиля, хорду и толщину.
Из всех характеристик лопасти только один параметр напрямую влияет на агрессивность: расположение центра давления относительно оси изменения шага. Центр давления это зона, из которой будет действовать подъемная сила, если ее всю стянуть в одну точку. Если центр давления находится перед осью изменения шага, то он создаст момент вокруг этой оси. Момент будет помогать сервоприводам увеличивать шаг лопасти и препятствовать сервоприводам уменьшать шаг. С такими лопастями ротор становится “подрывным” по шагам. Флаттер (треск от срыва потока) - это признак агрессивных лопастей и он часто приводит к чрезмерному изгибанию лопастей и повышенному износу наконечников линков. Если центр давления расположен позади оси изменения шага, то получается обратная ситуация - момент помогает сервоприводам вернуть лопасть к нулевому шагу.
Центр давления, расположенный впереди относительно оси изменения шага, стремится увеличит шаг лопасти. Перемещение центра давления назад относительно оси изменения шага приводит к появлению момента, уменьшающего шаг лопасти.
Расположение центра давления относительно оси изменения шага в большей степени определяется балансом лопасти относительно крепежного отверстия в комле. Если подвесить лопасть за крепежное отверстие и дать свободно свисать вниз, то по отклонению лопасти от вертикали можно судить о расположении центра давления. Если лопасть отклоняется в сторону наступающей кромки, то центр давления впереди, если отклоняется в сторону отступающей кромки, то центр давления сзади. Из всех сил, действующих на лопасть во время вращения, преобладает центробежная сила, которая расправляет лопасти и приводит к тому, что центр давления занимает положение, обнаруженное во время статического теста с подвешиванием лопасти.
FBL лопасти конструируются с тяжелой наступающей кромкой, которая отклоняет лопасть в сторону отступающей кромки, поэтому в статичном тесте FBL лопасти не выступают вперед и даже немного отклоняются назад.
Подвешенная за крепежное отверстие, лопасть отклоняется вперед, если она более агрессивна (слева), и назад, если менее агрессивна (справа).
Если бы центробежная сила была единственной силой, действующей на лопасть, было бы очень просто определить положение центра давления относительно оси изменения шага. Но сила сопротивления и приводящая сила авторотации, действуя на лопасть, приводят к опережению и отставанию. Во время работы шагом сила сопротивления приводит к отставанию лопасти, что в свою очередь смещает центр давления назад. Во время авторотации приводящая сила немного смещает лопасть вперед. Изменение положения центра давления приводит к постоянному изменению нагрузки на сервоприводы.
Во время полета под тягой (сверху) сила сопротивления смещает центр давления назад относительно оси изменения шага. Во время авторотации (снизу) приводящая сила двигает лопасть вперед относительно оси изменения шага. Точное положение не совсем совпадает с приведенным на рисунке. Рисунок показывает относительное перемещение.
В работе лопастей и в определении положения центра давления слишком много переменных. Кертис прошел длинный путь проб и ошибок, подбирая характеристики лопастей для каждого конкретного применения. В настоящее время на рынке доступны 4 типа лопастей Radix: FAI, FBL, Стандартные и SB (Stick Banger). В порядке увеличения агрессивности: FAI лопасти самые стабильные, SB самые агрессивные. Для FAI полета нужны более стабильные лопасти, которые позволяют минимизировать влияние внешних воздействий и тем самым уменьшают необходимость в подруливании. Совсем другое дело – 3D полет на флайбарном вертолете. Лопасти Radix SB дают наиболее быстрый отклик на управление для флайбарного вертолета. В случае с FBL вертолетом более стабильные FBL лопасти никак не ограничивают маневренность, напротив, позволяют улучшить характеристики управления.
Лопасти Radix FBL имеют более высокую гироскопическую стабильность и сниженную агрессивность, которые позволяют получить более предсказуемую нагрузку на сервоприводы во время полета. Центр давления не расположен слишком далеко впереди, чтобы не создавать флаттер и излишнюю нагрузку на сервоприводы, Но также центр давления не находится слишком далеко сзади, иначе ротор будет слишком медленно реагировать на управление. Лопасти разработаны с тем расчетом, чтобы оказывать как можно меньше влияния на работу FBL системы.
Заключение
Надеюсь, что после прочтения этой статьи вы поймете, что в FBL лопастях нет ничего магического. Это всего лишь еще одна возможность тонкой настройки работы системы. Возможно те лопасти, что у вас уже есть, дают достаточный уровень стабильности и агрессивности для работы FBL системы. Прежде чем покупать FBL лопасти, убедитесь, что лопасти, которые у вас уже есть, точно не обладают требуемыми характеристиками. Проверьте как лопасти ведут себя, будучи подвешенными за крепежное отверстие, где расположен продольный центр тяжести по отношению к тем лопастям, которые вы хотите приобрести. Если вы обнаружите, что ваши лопасти уже обладают характеристиками, подходящими для FBL системы, то лучше попробуйте провести дополнительную настройку системы стабилизации. Если вы уверены, что используете нестабильные лопасти с агрессивным характером, и система стабилизации вынуждена “сражаться” с ними, чтобы поддержать ориентацию и прямолинейность движения модели, то попробуйте специальные FBL лопасти. Вероятнее всего они помогут.
Автор: Арт Корал
Статья опубликована в RCHeli Январь 2011
Счастлив тот кто не врёт, кто придуманным живёт
Офлайн
#16 Июль 26, 2013 15:08:32
- CAMELION
-
-
- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5864
- Репутация:
12
- Профиль Отправить e-mail
Если вы новичёк или как настроить вертолёт!
Если нет гувернера или “Как приготовить регулятор”
Один из моих вертолетов, MSH Protos, который был приобретен подержанным около трех месяцев назад, на сегодня сделал порядка 50 вылет. Вместе с моделью мне достался регулятор Align RCE-BL60G, который я настроил для полета по кривым. Результатом работы регулятора и штатного мотора Lipotech я остался доволен и кратко упоминал об этом в статье “Мой MSH Protos”. Сейчас хочу рассказать о настройке регулятора по кривым более подробно.
В этом месте следовало бы выдать фразу типа: “для постоянства поведения вертолета важна неизменность оборотов основного ротора” и далее в том же духе, но от таких фраз сводит зубы, да вы и сами прекрасно знаете, что постоянные обороты важны и потому используете гувернер. А если гувернера нет, или, как в случае с RCE-BL60G, пользоваться им противопоказано, то остается второй вариант - управлять мотором с помощью кривых газа.
Немного о настройке регулятора: для наибольшей отдачи я установил высокий тайминг и высокую скорость изменения оборотов. Высокий тайминг позволит получить немного больше мощности от мотора, обычно ценой снижения эффективности (она же КПД). Высокая скорость изменения оборотов позволит регулятору быстрее и точнее следовать за движениями стика газа. При средней и низкой скорости изменения оборотов присутствует заметная задержка между движением стика газа и увеличением оборотов мотора регулятором.
Последующее описание применимо практически к любым регуляторам и к практически любой аппаратуре. В любой случае, подходите к вопросу творчески и не бойтесь экспериментировать, не забывая о безопасности, разумеется.
Нормальный полетный режим
Этот режим применим для взлета и посадки, потому достаточно будет сделать кривую типа “столовая гора”. В нижнем положении стика газа кривая для нормального режима всегда имеет 0%. Далее от нуля крутой подъем вверх до 50%-60% и дальше горизонтальная полка до крайней правой точки. Если вы все же летаете в нормале, то повторите правую половину кривой из режима IDEL UP. На рисунке ниже приведена нормальная кривая с уровнем 60% в центре. Высота кривой зависит от оборотов, которые вы хотите получить и, если нужно больше оборотов, то поднимите кривую выше.
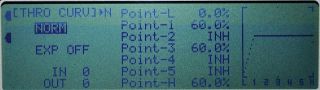
Пример плоской кривой газа для режима Normal
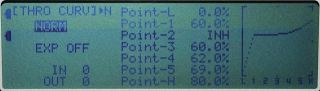
Пример кривой газа для полета в режиме Normal.
Режим IDLE UP (пилотажный режим)
Инструкции к вертолетам советуют использовать кривую газа для пилотажного режима в виде галки. По опыту, при такой кривой газа обороты в околонулевой зоне ( примерно 1/2 хода стика от центра) получаются выше, чем в нуле шагов. Когда я еще летал на Трекс 450, то опытным путем (сверяя обороты по тахометру) получил кривую, по виду больше напоминающая параболу. Около среднего положения стика, это практически горизонтальная линия, которая к крайним точкам прогрессивно поднимается вверх. Такая кривая точнее изменяет отдачу силовой установки в зависимости от величины общего шага ротора и позволяет точнее поддерживать обороты ротора.
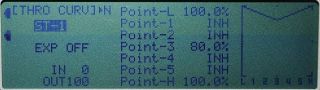
Пример кривой газа “галка” для пилотажного режима IDEL UP
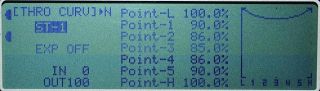
Пример кривой газа “парабола” для пилотажного режима IDEL UP
Хорошая отправная точка, это кривая газа с перепадом между средней и крайними точками около 15%, например 100%-85%-100% или 95%-80%-95%. Высота подъема кривой газа, кроме всего прочего, зависит от состояния аккумуляторов. Чем лучше аккумуляторы держат напряжение под нагрузкой, тем меньше может быть подъем кривой газа. Если аккумуляторы слабые, то будет полезно иметь возможность компенсировать просадку напряжения более крутым подъемом. В этом случае ориентируйтесь на кривую 100%-75%-100% или близкую к этому. Рабочие обороты в этом случае, очевидно, будут ниже.
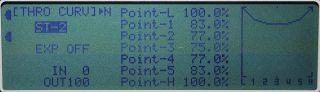
Пример кривой газа - низкая парабола с высоким подъемом для режима IDEL UP. Для слабых аккумуляторов.
С нагрузкой от общего шага разобрались. Следующий момент, менее очевиден, это компенсация изменения нагрузки на силовую в зависимости от работы по циклическому шагу и работы хвоста. На первый взгляд нагрузка от работы рулем и цикликом незначительная, однако на практике падение оборотов заметно, к примеру, при интенсивной работе рулем. Здесь на помощь приходят миксеры Элерон->Газ, Элеватор->Газ и Руль->Газ. Работа миксеров заключается в том, чтобы увеличить отдачу регулятора при отклонении стиков циклика и руля от среднего положения. Например, отклоняем стик элеронов влево, пропорционально отклонению стика миксер поднимает газ и тем самым мотор получает больше энергии и компенсирует нагрузку от работы ротора по циклику.
Тем, кто использует аппаратуру JR DSX9 повезло немного больше. Такие миксеры уже предустановлены в отдельном меню и нужно лишь указать пропорцию микширования.
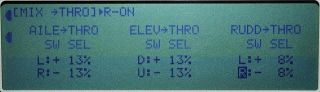
Пример настройки миксеров Циклик->Газ и Руль->Газ в аппаратуре JR DSX9
Вопрос только в пропорции микширования. Я исходил из соображения, получить 100% газа на харикейне (быстрый полет по кругу), когда общий шаг держится на уровне 70%-90% хода стика и циклик около 60%-70% хода стика от среднего положения. В этот момент по кривой газа получается около 90-95% газа и достаточно добавить еще 5%-10% газа от миксера циклик-газ, чтобы получить желаемые 100% газа на выходе. Если при полном отклоненнии стика мы установим 10%-15% микширования, то, соответственно при 60%-70% по циклику получим прибавку к газу от 5% до 10%.
Хвостовой ротор дает еще меньше нагрузки. Начать можно с микширования 10% и проверить работу мотора в висении при частых сменах направления вращения пируэта. В случае с Протосом +8% оказалось достаточно. Не скажу, что я с ювелирной точностью подбирал это значение, просто по полету устроило.
С настройкой все. Осталось взвесить “за” и “против” использования кривых газа, подвести итог, и можно отправляться на поле, пробовать настройки.
Преимущества кривых газа перед гувернером:
Нет задержки по газу при работе общим и циклическим шагом. Газ следует за движением стиками. Гувернер, напротив, всегда работает по факту снижения оборотов.
Кривые газа не сбрасывают обороты при перекрутах. На некоторых гувернерах сброс оборотов при перекрутах может давать весьма неприятны провалы в работе силовой.
В целом, для нормального полета по кривым можно установить пиньон на 1 зуб меньше чем для гувернера, тем самым снизить нагрузку на силовую.
Преимущества гувернера перед кривыми:
В большинстве случаев гувернер проще в настройке - кривая газа в виде полки, миксеры отсутствуют. И еще 1-2 параметра работы гувернера в регуляторе, которые зачастую не требуют подстройки.
От взлета до посадки гувернер поддерживает постоянные обороты, компенсируя снижение напряжения на аккумуляторах. Миксеры так не умеют, разве только настроить пару полетных режимов, один с низким уровнем газа для первой половины полета, второй с высоким уровнем газа или полку 100%, соответственно, для второй половины полета.
При перекрутах ротора (например, при вертикальном спуске) гувернер имеет возможность сбросить обороты. Кривые на спуске наоборот добавят газа, чем вызовут еще больший рост оборотов. Некоторые гувернеры сбрасывают обороты слишком сильно, см. п. 2 в преимуществах кривых.
Заключение
Для небольших моделей (до 500-ого класса) кривые газа работают хорошо и даже имеют некоторые преимущества перед гувернером. Настройка кривых газа не займет много времени и добавит еще немного качества настройке вашей модели, поэтому не пренебрегайте ей. С большими моделями класса 600 и выше ситуация уже несколько иная. Большие роторы тяжелее переносят превышение максимальных оборотов и поэтому следить за оборотами лучше с помощью качественного гувернера.
Автор: Oleg на 9:59
Тэги: 3D, ESC, настройка, обслуживание вертолета
Счастлив тот кто не врёт, кто придуманным живёт
Один из моих вертолетов, MSH Protos, который был приобретен подержанным около трех месяцев назад, на сегодня сделал порядка 50 вылет. Вместе с моделью мне достался регулятор Align RCE-BL60G, который я настроил для полета по кривым. Результатом работы регулятора и штатного мотора Lipotech я остался доволен и кратко упоминал об этом в статье “Мой MSH Protos”. Сейчас хочу рассказать о настройке регулятора по кривым более подробно.
В этом месте следовало бы выдать фразу типа: “для постоянства поведения вертолета важна неизменность оборотов основного ротора” и далее в том же духе, но от таких фраз сводит зубы, да вы и сами прекрасно знаете, что постоянные обороты важны и потому используете гувернер. А если гувернера нет, или, как в случае с RCE-BL60G, пользоваться им противопоказано, то остается второй вариант - управлять мотором с помощью кривых газа.
Немного о настройке регулятора: для наибольшей отдачи я установил высокий тайминг и высокую скорость изменения оборотов. Высокий тайминг позволит получить немного больше мощности от мотора, обычно ценой снижения эффективности (она же КПД). Высокая скорость изменения оборотов позволит регулятору быстрее и точнее следовать за движениями стика газа. При средней и низкой скорости изменения оборотов присутствует заметная задержка между движением стика газа и увеличением оборотов мотора регулятором.
Последующее описание применимо практически к любым регуляторам и к практически любой аппаратуре. В любой случае, подходите к вопросу творчески и не бойтесь экспериментировать, не забывая о безопасности, разумеется.
Нормальный полетный режим
Этот режим применим для взлета и посадки, потому достаточно будет сделать кривую типа “столовая гора”. В нижнем положении стика газа кривая для нормального режима всегда имеет 0%. Далее от нуля крутой подъем вверх до 50%-60% и дальше горизонтальная полка до крайней правой точки. Если вы все же летаете в нормале, то повторите правую половину кривой из режима IDEL UP. На рисунке ниже приведена нормальная кривая с уровнем 60% в центре. Высота кривой зависит от оборотов, которые вы хотите получить и, если нужно больше оборотов, то поднимите кривую выше.
Пример плоской кривой газа для режима Normal
Пример кривой газа для полета в режиме Normal.
Режим IDLE UP (пилотажный режим)
Инструкции к вертолетам советуют использовать кривую газа для пилотажного режима в виде галки. По опыту, при такой кривой газа обороты в околонулевой зоне ( примерно 1/2 хода стика от центра) получаются выше, чем в нуле шагов. Когда я еще летал на Трекс 450, то опытным путем (сверяя обороты по тахометру) получил кривую, по виду больше напоминающая параболу. Около среднего положения стика, это практически горизонтальная линия, которая к крайним точкам прогрессивно поднимается вверх. Такая кривая точнее изменяет отдачу силовой установки в зависимости от величины общего шага ротора и позволяет точнее поддерживать обороты ротора.
Пример кривой газа “галка” для пилотажного режима IDEL UP
Пример кривой газа “парабола” для пилотажного режима IDEL UP
Хорошая отправная точка, это кривая газа с перепадом между средней и крайними точками около 15%, например 100%-85%-100% или 95%-80%-95%. Высота подъема кривой газа, кроме всего прочего, зависит от состояния аккумуляторов. Чем лучше аккумуляторы держат напряжение под нагрузкой, тем меньше может быть подъем кривой газа. Если аккумуляторы слабые, то будет полезно иметь возможность компенсировать просадку напряжения более крутым подъемом. В этом случае ориентируйтесь на кривую 100%-75%-100% или близкую к этому. Рабочие обороты в этом случае, очевидно, будут ниже.
Пример кривой газа - низкая парабола с высоким подъемом для режима IDEL UP. Для слабых аккумуляторов.
С нагрузкой от общего шага разобрались. Следующий момент, менее очевиден, это компенсация изменения нагрузки на силовую в зависимости от работы по циклическому шагу и работы хвоста. На первый взгляд нагрузка от работы рулем и цикликом незначительная, однако на практике падение оборотов заметно, к примеру, при интенсивной работе рулем. Здесь на помощь приходят миксеры Элерон->Газ, Элеватор->Газ и Руль->Газ. Работа миксеров заключается в том, чтобы увеличить отдачу регулятора при отклонении стиков циклика и руля от среднего положения. Например, отклоняем стик элеронов влево, пропорционально отклонению стика миксер поднимает газ и тем самым мотор получает больше энергии и компенсирует нагрузку от работы ротора по циклику.
Тем, кто использует аппаратуру JR DSX9 повезло немного больше. Такие миксеры уже предустановлены в отдельном меню и нужно лишь указать пропорцию микширования.
Пример настройки миксеров Циклик->Газ и Руль->Газ в аппаратуре JR DSX9
Вопрос только в пропорции микширования. Я исходил из соображения, получить 100% газа на харикейне (быстрый полет по кругу), когда общий шаг держится на уровне 70%-90% хода стика и циклик около 60%-70% хода стика от среднего положения. В этот момент по кривой газа получается около 90-95% газа и достаточно добавить еще 5%-10% газа от миксера циклик-газ, чтобы получить желаемые 100% газа на выходе. Если при полном отклоненнии стика мы установим 10%-15% микширования, то, соответственно при 60%-70% по циклику получим прибавку к газу от 5% до 10%.
Хвостовой ротор дает еще меньше нагрузки. Начать можно с микширования 10% и проверить работу мотора в висении при частых сменах направления вращения пируэта. В случае с Протосом +8% оказалось достаточно. Не скажу, что я с ювелирной точностью подбирал это значение, просто по полету устроило.
С настройкой все. Осталось взвесить “за” и “против” использования кривых газа, подвести итог, и можно отправляться на поле, пробовать настройки.
Преимущества кривых газа перед гувернером:
Нет задержки по газу при работе общим и циклическим шагом. Газ следует за движением стиками. Гувернер, напротив, всегда работает по факту снижения оборотов.
Кривые газа не сбрасывают обороты при перекрутах. На некоторых гувернерах сброс оборотов при перекрутах может давать весьма неприятны провалы в работе силовой.
В целом, для нормального полета по кривым можно установить пиньон на 1 зуб меньше чем для гувернера, тем самым снизить нагрузку на силовую.
Преимущества гувернера перед кривыми:
В большинстве случаев гувернер проще в настройке - кривая газа в виде полки, миксеры отсутствуют. И еще 1-2 параметра работы гувернера в регуляторе, которые зачастую не требуют подстройки.
От взлета до посадки гувернер поддерживает постоянные обороты, компенсируя снижение напряжения на аккумуляторах. Миксеры так не умеют, разве только настроить пару полетных режимов, один с низким уровнем газа для первой половины полета, второй с высоким уровнем газа или полку 100%, соответственно, для второй половины полета.
При перекрутах ротора (например, при вертикальном спуске) гувернер имеет возможность сбросить обороты. Кривые на спуске наоборот добавят газа, чем вызовут еще больший рост оборотов. Некоторые гувернеры сбрасывают обороты слишком сильно, см. п. 2 в преимуществах кривых.
Заключение
Для небольших моделей (до 500-ого класса) кривые газа работают хорошо и даже имеют некоторые преимущества перед гувернером. Настройка кривых газа не займет много времени и добавит еще немного качества настройке вашей модели, поэтому не пренебрегайте ей. С большими моделями класса 600 и выше ситуация уже несколько иная. Большие роторы тяжелее переносят превышение максимальных оборотов и поэтому следить за оборотами лучше с помощью качественного гувернера.
Автор: Oleg на 9:59
Тэги: 3D, ESC, настройка, обслуживание вертолета
Счастлив тот кто не врёт, кто придуманным живёт
Офлайн
#17 Авг. 3, 2013 19:49:43
- CAMELION
-
-
- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5864
- Репутация:
12
- Профиль Отправить e-mail
Если вы новичёк или как настроить вертолёт!
Вот так в принципе собираются вертолёты
Счастлив тот кто не врёт, кто придуманным живёт
Счастлив тот кто не врёт, кто придуманным живёт
Офлайн
#18 Авг. 9, 2013 13:29:10
- CAMELION
-
-
- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5864
- Репутация:
12
- Профиль Отправить e-mail
Если вы новичёк или как настроить вертолёт!
Пособие для начинающего вертолётчика
Всем кто только в начале этого поистине захватывающего пути читать рекомендуется!
Счастлив тот кто не врёт, кто придуманным живёт
Всем кто только в начале этого поистине захватывающего пути читать рекомендуется!
Файл: faq.pdf 1.1 MБ
Счастлив тот кто не врёт, кто придуманным живёт
Офлайн
#19 Сен. 1, 2013 00:57:25
- CAMELION
-
-
- Юрий
- Из: Планета земля
- Зарегистрирован: 2011-10-12
- Сообщения: 5864
- Репутация:
12
- Профиль Отправить e-mail
Если вы новичёк или как настроить вертолёт!
Ещё по сервомашинкам
Автор статьи Владимир Васильков (Vovic)
Взято: http://www.rcdesign.ru [rcdesign.ru]
Введение
Данная статья посвящена непременному элементу аппаратуры радиоуправления - рулевым машинкам. Такое название закрепилось за исполнительными механизмами в эпоху “железного занавеса”. На европейских языках их называют коротко - “servo”. Чтобы было понятно и патриотам и космополитам, будем называть их сервомашинками. Сервомашинки устанавливаются на радиоуправляемой модели. Их задача - преобразовать сигнал от приемника в движение рулей модели, согласно действием пилота.
Ведущие производители аппаратуры радиоуправления выпускают большую номенклатуру сервомашинок, по нескольку десятков каждый. В этой статье дается представление, как устроена сервомашинка, как она работает, чтобы помочь в правильном выборе нужного изделия для вашей модели. В первой половине статьи рассказываются азы и описываются основные виды сервомашинок. Во второй половине содержится объяснение принципов работы сервомашинок и ряд тонкостей, которые при отсутствии интереса можно опустить и не читать.
Устройство сервомашинки
Современные сервомашинки имеют довольно однотипную конструкцию:

Все элементы сервомашинки смонтированы, как правило, в полистироловом корпусе, состоящем из основания, верхней и нижней крышек. В полости под верхней крышкой смонтирован редуктор, состоящий из 4-6 шестеренок с зубьями разного модуля. В основной части смонтирован мотор, потенциометр обратной связи и размещена плата управления. Корпус сервомашинки имеет по бокам два ушка с отверстиями для крепления на модели. Элементы корпуса стянуты между собой по углам четырьмя длинными шурупами. Для защиты от вибрации сервомашинки крепятся на модели не жестко, а через специальные резиновые втулки с латунными гильзочками.
На выходном валу редуктора, выступающего из верхней крышки, на шлицах винтом (шурупом) закреплена качалка, которую посредством тяги механически соединяют с рулем модели. Собственно, поворот качалки и будет преобразовываться в механическое движение руля. Сам поворот качалки разные моделисты называют по-разному. Широко распространен термин “расход машинки”. Известен также и “путь перекладки качалки/руля”. В дальнейшем чаще употребляется последний термин, хотя привыкшие к расходам рулей могут именно их и воспринимать там, где написано “путь перекладки” и “поворот качалки”.
В качестве приводного мотора в сервомашинках используются коллекторные электродвигатели постоянного тока. На плате управления собрана вся электронная схема, базирующаяся на специализированной микросхеме. Плата соединена с приемником трехпроводным кабелем, который выходит из корпуса сервомашинки через специальное отверстие.
Конструктивные разновидности сервомашинок
Широкая номенклатура сервомашинок обусловлена разными требованиями к ним, зависящими от модели, где они применяются. Прежде всего, модели различаются габаритами. С этого и начнем. Для моделей-гигантов выпускаются сервомашинки формата (размера) “гигант”:

Они обладают большой мощностью, моментом и прочностью механики. Вес и габариты - тоже не маленькие.
Наиболее распространены сервомашинки стандартного формата:

В этом формате выпускаются и самые дешевые, и самые дорогие сервомашинки. Наиболее мощные из них перекрывают по моменту и мощности сервомашинки формата гигант, имея существенно меньшие габариты и вес. Но вот цена при этом, к сожалению, больше. В размерах, близких к стандарту выпускаются низкопрофильные сервомашинки:

Их удобно закреплять непосредственно на крыле для управления элеронами.
Для небольших моделей выпускаются сервомашинки формата мини:

По силовым характеристикам они часто не уступают обычным сервомашинкам стандартного формата, но имеют меньший вес и габариты.
В связи с бурным развитием летающих моделей паркового класса и комнатных, где очень важен каждый грамм бортового оборудования, выпускается гамма сервомашинок форматов “микро”, “нано” и “пико”:


О мощности здесь говорить не приходится, поскольку нагрузки на рулях таких моделей ничтожные.
Теперь вернемся к содержимому сервомашинок. Начнем с наиболее уязвимого при авариях узла, - с редуктора. Редукторы, как уже говорилось выше, содержат 4-6 шестеренок, и бывают пластиковыми или металлическими. Впрочем, даже в последнем случае, часто вторая и третья от мотора шестеренки все-таки пластиковые.

Металлические (латунные, иногда алюминиевые) шестерни обладают на порядок большей ударной прочностью зубьев. То есть, их живучесть при авариях намного выше, чем у пластиковых шестеренок. Но они существенно дороже и несколько тяжелее. Многие модели сервомашинок выпускаются в двух вариантах: с пластиковыми и металлическими шестернями. В названии сервомашинки с металлическими шестернями добавляют буквы MG (Metal Gear). Помимо цены, такие машинки имеют еще один недостаток. На моделях с высоким уровнем вибраций со временем на зубьях шестерен возникает наклеп и как следствие - люфт редуктора. Но это только после многолетней работы. Пластиковые шестерни таким эффектом не страдают, погибая зачастую намного раньше в авариях.
Для борьбы с люфтами редуктора, которые прямо влияют на точность позиционирования качалки, а также могут порождать на летающих моделях флаттер рулей, выходной вал сервомашинки устанавливают на шарикоподшипники. Такие сервомашинки имеют в названии буквы ВВ (Ball Bearing). Особенно полезно применение такой опции на моделях с большим уровнем вибраций, поскольку обычные втулки скольжения выходного вала сервомашинки довольно быстро разбалтываются, и возникает люфт. Недостаток опции - цена. Многие производители выпускают набор деталей, позволяющих самому переделать стандартную сервомашинку. В набор входит новая верхняя крышка корпуса и шарикоподшипники:

Для высокомощных сервомашинок с металлическим редуктором выпускаются качалки повышенной прочности из стеклопластика или из металла:

Кстати, имейте в виду, что у разных производителей количество зубьев на выходном валу редуктора может отличаться. Поэтому, если вы решите докупать качалки отдельно, убедитесь, что они подходят к сервомашинке.
Передаточное отношение редукторов сервомашинок колеблется в диапазоне 200-400. В стандартной и очень распространенной модели HS422 оно равно 271. Произведение момента сервомашинки на скорость перекладки равно мощности мотора. Разные варианты применения сервомашинок имеют зачастую противоположные приоритеты использования этой мощности. Поэтому многие модели сервомашинок выпускаются в двух конструктивных вариантах: Вариант High Speed имеет меньшее передаточное отношение редуктора и как следствие - меньший момент на валу, но более высокую скорость перекладки. Вариант High Torque имеет большее передаточное отношение редуктора и как следствие - больший момент и меньшую скорость перекладки. Остальные детали таких “близнецов” никак не отличаются. Цена - тоже. В каталогах они различаются соответствующими надписями и цифрами в индексе.
В сервомашинках используются коллекторные моторы, как правило, с трехполюсным ротором и возбуждением от постоянного магнита. Встречаются и пятиполюсные роторы, но реже, и в основном, на мощных сервомашинках. Отдельно стоят сервомашинки с coreless-мотором (мотор с полым ротором). О них подробнее написано в главе о динамике работы сервомашинки. Они скоростные и высокоточные. Но и стоят намного дороже. Их применение оправдано, к примеру, в системах с гироскопами. Во многих других случаях все, как обычно, упирается в деньги.
Потенциометр обратной связи - деталька неказистая, но очень важная. После редуктора, страдающего в основном при авариях, она занимает второе место при определении ресурса и надежности сервомашинки. В потенциометре по специальной пленке из резистивного материала скользит бегунок с токосъемником. Когда он протирает пленку насквозь, - сервомашинка отказывает. Чаще всего, протирка происходит в нейтральном положении качалки из-за вибраций модели. Для увеличения ресурса потенциометра сейчас практически на всех сервомашинках используют непрямой привод оси потенциометра, - когда между нею и выходным валом сервомашинки помещена эластичная втулка. Кроме того, потенциометры имеют по несколько (на дорогих сервомашинках до шести) токосъемных проволочек в параллель, и каждая бежит по своей дорожке на резистивной пленке. В этом случае отказ будет тогда, когда протрутся все дорожки в одном месте. Проверить исправность потенциометра можно, подав на сервомашинку медленно и плавно изменяющуюся команду на перекладку из одного крайнего положения в другое. При этом надо придерживать качалку пальцами. Если она движется плавно, без рывков и замираний - все в порядке.
Если сервомашинку зальет водой или грязью, потенциометр надо чистить спиртом, редуктор промывать и смазывать специальной силиконовой смазкой, применяемой в видеомагнитофонах. Для случаев, когда грязи и воды избежать невозможно, выпускаются сервомашинки в специальном водозащитном исполнении:

Как показывает опыт автора, в таком исполнении сервомашинка выдерживает кратковременное погружение в воду на глубину до метра. В ней выходной вал имеет миниатюрную резиновую манжету, а во все сочленения корпусных деталей и под стягивающие шурупы заложены резиновые прокладки. Выход кабеля из корпуса уплотнен силиконовым герметиком.
Корпуса большинства сервомашинок однотипны. Исключение составляют высокомощные скоростные сервомашинки с цифровой управляющей электроникой, предназначенные для работы с гироскопами. Там на силовой части электроники рассеивается такая мощность, что часть корпуса сервомашинки делают из алюминия с оребрением, которое выполняет функцию радиатора охлаждения:

И, наконец, различия в платах управления. Изначально, электроника рулевых машинок строилась на аналоговых элементах. Но с развитием элементной базы появились так называемые “цифровые” сервомашинки, которые содержат в себе микроконтроллер. Благодаря этому стало возможным использовать более сложные алгоритмы управления, улучшающие параметры сервомашинок, а также подстраивать эти параметры программным способом под специфичные условия. Впрочем, здесь я углубляться не буду, а лишь упомяну, что некоторые сервомашинки (не только цифровые) способны работать с большей частотой управляющих сигналов. То есть, за секунду они способны отработать не 50 управляющих импульсов, а 70-150, и до 270. Это необходимо для уменьшения времени реакции в системах с гироскопом. Подробнее об этом можно почитать в статье по цифровым машинкам и в главе по динамике работы сервомашинки.
Специализированные сервомашинки
Помимо сервомашинок общего применения, выпускаются и специализированные изделия. Прежде всего, это сервомашинки для уборки-выпуска шасси на летающих моделях:

Эти сервомашинки имеют гораздо большее передаточное отношение редуктора, из-за чего они намного медленнее и имеют больший крутящий момент, в сравнении с обычными. Диапазон угла поворота их качалки также больше: 150-180 градусов. Усилие удержания у них, как правило, больше прочности качалки. Есть два варианта электроники таких сервомашинок, обычная пропорциональная с потенциометром обратной связи и дискретная. В последнем случае качалка имеет только два фиксированных положения во включенном состоянии.
Для управления парусами яхт используются шкотовые лебедки, представляющие собой сервомашинку с многооборотным выходным валом. Вместо качалки на валу закреплен шкотовый барабан:

Мощность мотора такой лебедки много больше и питаются они часто от специального шкотового аккумулятора повышенного напряжения. Диапазон поворота барабана 3 - 5 полных оборотов. Для регулирования усилия на шкоте используют сменные барабаны разного диаметра.
К специализированным сервомашинкам можно отнести изделия для автомоделей среднего и крупного масштаба. От обычных их отличает повышенная мощность мотора, питание от силового аккумулятора и высокая прочность механики к ударным нагрузкам.
Основные характеристики сервомашинок
Базовыми техническими характеристиками сервомашинок являются момент на выходном валу и скорость поворота качалки. Момент измеряют в кг/см (хотя по системе СИ надо бы в Н/метр). Момент в 3 кг/см означает, что сервомашинка будет тянуть тягу, шарнирно закрепленную на качалке в 1 сантиметре от ее оси с силой в 3 кг. Соответственно, если тягу закрепить на качалке в 2 сантиметрах от оси, то сила составит только 1,5 кг. То есть, произведение силы в кг на плечо качалки в см - это и есть момент.
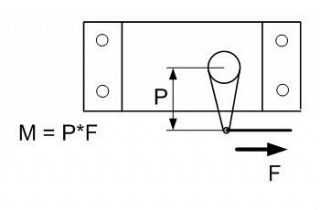
Для мощных сервомашинок помимо крутящего момента указывают еще момент силового удержания, который намного больше. При повороте силы трения в редукторе мешают мотору, поэтому и момент меньше. А при силовом удержании силы трения редуктора работают совместно с мотором, поэтому этот момент больше. Кстати, разделив разность этих моментов пополам, можно оценить потери редуктора на трение в конкретной сервомашинке.
Англо-американский мир, к сожалению, пьет пиво не литрами, как мы, а пинтами. Соответственно и момент сервомашинок они измеряют не в кг/см, а в oz.-in, то есть в унциях на дюйм. Учитывая, что в дюйме 2,54 сантиметра, а унция тянет на 28,35 грамм, можно посчитать, что момент в 3 кг/см эквивалентен 41,66 oz.-in. Неудобно, конечно, пересчитывать, но что делать?
Скорость поворота качалки оценивают по времени, требуемом для ее поворота на определенный угол. Например, 0,20с/60градусов. Слава создателю, англо-американский мир не придумал ничего вместо секунд и градусов. Эту характеристику пересчитывать не надо. Разные производители указывают разные углы поворота качалки, зачастую по рекламным соображениям. Согласитесь, что 0,15с/45градусов выглядит более привлекательно, чем 0,20с/60градусов, а ведь это одно и тоже.
В школе по физике вы проходили, что произведение момента на угловую скорость это мощность. В нашем случае - мощность мотора сервомашинки, за вычетом потерь в редукторе. Какая же мощность, и для каких применений нужна? Пример силового расчета сервомашинки для самолета приведен во второй половине статьи. Здесь приведена лишь как ориентир стандартная сервомашинка, типичные характеристики которой даны выше в качестве примеров. Таких машинок хватает для большинства начинающих моделистов и их моделей. К тому же они самые дешевые.
Чаще всего, сервомашинки питаются тем же напряжением, что и приемник на модели - 4,8 вольт от батареи из четырех NiCd или NiMH аккумуляторов. Очень многие сервомашинки (но не все!) можно питать от повышенного напряжения в 6 вольт от батареи из пяти аккумуляторов. При этом мощность мотора возрастает (она пропорциональна квадрату напряжения). Соответственно, момент на выходном валу возрастает, а время поворота качалки- снижается, то есть сервомашинка становится более скоростной. Производители часто указывают момент и время поворота для обоих питающих напряжений. Повышение напряжения питания, если это разрешено производителем, как правило, ресурс сервомашинки заметно не снижает. Для некоторых изделий производитель не рекомендует, или даже запрещает использование повышенного напряжения питания. Почему, - мы рассмотрим ниже.
Управляющая электроника потребляет незначительный ток: 8-10 мА. Вроде немного. Но шесть сервомашинок на планере за час парения с неподвижными рулями (в жизни так не бывает!) сожрут 60 мА/часов. Этот расход тоже надо учитывать. В момент поворота с усилием, близким к максимальному мотор потребляет, в зависимости от мощности 0,5 - 2 ампера. Это потребление сильно зависит от потерь в силовой проводке от качалки сервомашинки до руля. В том числе, и от потерь в петлях руля. Широко распространенные боудены - гибкая тяга (трос) в оболочке при ее значительных изгибах могут стать виновником стремительной разрядки бортового аккумулятора. Его энергия через мотор сервомашинки пойдет на преодоление трения в боудене. При питании сервомашинки повышенным напряжением растет также и потребляемый ее мотором ток. Это также надо учитывать при определении необходимой емкости бортового аккумулятора. Еще для оценки энергопотребления важно учитывать, в каком режиме находится сервомашинка с неподвижным рулем. Если в статике, - то мотор не потребляет тока. А вот если в режиме силового удержания, - то тут аккумулятор разряжается тоже очень быстро. Это характерно для тугого руля с пружинящей тягой.
Несколько слов про питание сервомашинок на моделях с электроприводом. На них часто отсутствует отдельный аккумулятор для питания приемника и сервомашинок. Вместо него в регулятор хода встраивают стабилизатор бортового питания - ВЕС-система, который напряжение ходового аккумулятора преобразует в пятивольтовое питание. С одной стороны это удобно, нет лишнего веса. Но в этом случае надо осторожно подходить к применению на модели мощных сервомашинок, особенно цифровых. Дело в том, что нагрузочная способность ВЕС-стабилизатора, как правило, невелика, от 1,5 до 3 ампер, что обусловлено применением в ВЕС обычного параметрического стабилизатора. Теперь представим, что на модели стоит три сервомашинки, в пике потребляющие по 1,5 ампера. Тогда даже при 3-амперном ВЕС-стабилизаторе будет провал питающего и приемник (!) напряжения. А это уже чревато потерей модели. Одним из способов обезопасить модель от таких проблем, может служить буферное (резервное) питание бортовой электроники от отдельного миниатюрного аккумулятора с развязкой от ВЕС-стабилизатора через диоды Шоттки. Подробнее об этом можно почитать у Карла Шульца на его сайте.
И еще. Сервомашинки формата “пико” и “нано” зачастую имеют моторы с КПД, в несколько раз меньшим, чем у обычных сервомашинок. Поэтому, развивая равную мощность с сервомашинкой “микро”, 9-граммовая “нано” может потреблять вдвое больший ток. Это стоит учитывать поклонникам сверхлегких летающих моделей.
Помимо момента и скорости поворота качалки сервомашинки характеризуются таким параметром, как точность отработки команды. Подробнее о природе и значении точности сервомашинок описано во второй половине статьи.
Подведем краткие итоги того, что было сказано в предыдущих разделах.
1 Габариты рулевых машинок варьируются в зависимости от задач, в которых они используются. Самые распространенные машинки - “стандартные” и “микро”. Машинки этих габаритов (формата) позволяют решить большинство задач, с которыми сталкиваются моделисты.
2 Все производители указывают помимо габаритов сервомашинки еще 2 основных параметра: усилие и скорость поворота качалки. Есть еще такое понятие как точность, но явно она обычно не называется.
3 На надежность машинки влияет ее механическая конструкция. Для повышения надежности серво, основную ось ставят на подшипники, а редукторы делают из металла.
4 По исполнению электронной начинки, рулевые машинки бывают обычными и цифровыми. Цифровые машинки позволяют добиться особенно высокой точности управления.
5 Применяя мощные (цифровые) сервомашинки надо позаботиться о достаточном для их энергопотребления питании бортовой электроники.
6 Для дополнительного повышения точности и скорости отработки, в качестве двигателя в сервомашинках могут применяться моторы с полым ротором.
7 Любые дополнительные опции приводят к росту цены рулевой машинки.
Чтобы закончить обзорное знакомство с сервомашинками, скажем несколько слов о конкретных производителях. На российском рынке наиболее представлены три бренда: JR, Futaba и Hitec. Наиболее престижными и надежными до недавнего времени считались первые, но теперь их догнали вторые. Hitec сейчас ведет агрессивную ценовую политику, поставляя сервомашинки не худшего качества, чем первые два производителя, но по меньшим ценам. Но на чемпионатах Hitec вы вряд ли встретите. Фирма KoPropo выпускает лучшие сервомашинки для автомоделей. Упомянем также специализирующуюся на сервомашинках фирму Volz. Ее машинки очень качественные. Очень неплохие сервомашинки, в том числе спаренные в одном корпусе выпускает Multiplex. Правда, на нашем рынке он не очень популярен.
Те, кому интересно, как и почему работает сервомашинка, могут читать дальше. Остальные могут обратиться непосредственно к каталогам и сайтам производителей и дистрибьюторов, чтобы со знанием дела подобрать по деньгам подходящие для вашей модели сервомашинки.
Принцип действия сервомашинки
Рассмотрим, как работает сервомашинка в первом приближении. Из статьи о передатчиках вы знаете, что на сервомашинку от приемника приходит импульсный сигнал с периодом 20 мс и с длительностью от 0,8 до 2,2 мс. Для того чтобы понять, как данный сигнал преобразуется в поворот качалки, мы рассмотрим типовую структурную схему сервомашинки:
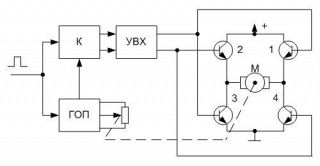
Схема состоит из генератора опорного импульса (ГОП), к которому подключен потенциометр обратной связи , компаратора (К), устройства выборки-хранения (УВХ) и силового моста, в диагональ которого включен электромотор (М). (Здесь базы транзисторов-ключей объединены условно).
Управляющий импульс от приемника приходит на компаратор и одновременно запускает генератор опорного импульса. Длительность опорного импульса зависит от положения потенциометра обратной связи, механически соединенного с выходным валом. В среднем положении качалки длительность равна 1,5 мс, в крайних положениях - 0,8 и 2,2 мс соответственно. Управляющий и опорный импульсы сравниваются компаратором по длительности. Разностный импульс появляется на верхнем, либо нижнем выходах компаратора, в зависимости от того, какой из сравниваемых импульсов длиннее. Длина разностного импульса определяет величину рассогласования между “требуемым” и “имеющимся” положением руля модели. Эта величина измеряется и запоминается в виде постоянного потенциала на время цикла управляющего импульса в устройстве выборки-хранения. (Здесь также дано упрощение работы УВХ. В действительности постоянный потенциал открывает ключи лишь при большом разностном импульсе, а при малых его значениях ключами управляет пропорционально удлиненный разностный импульс). Выходы последнего управляют ключами силового моста.
Проследим, как меняются сигналы в разных режимах работы сервомашинки:
1 Положение качалки соответствует положению джойстика на передатчике. При этом длительности управляющего и опорного импульсов в сервомашинке равны. На обоих выходах компаратора нули. Они же хранятся в устройстве выборки-хранения. Ключи обоих плеч моста закрыты, мотор обесточен, качалка сохраняет свое положение.
2 Пилот изменяет положение джойстика так, что управляющий импульс увеличился. Тогда компаратор на верхнем выводе выдаст разностный импульс. Его величина будет запомнена в УВХ. Верхний выход УВХ откроет 1 и 3 ключи моста. На мотор подано напряжение. Он начнет через редуктор поворачивать качалку и соответственно потенциометр обратной связи так, что длительность опорного импульса начнет возрастать. Такое состояние продлится столько циклов управляющего импульса, пока с его длительностью не сравняется длительность опорного импульса. После этого компаратор закроет ключи моста. Мотор остановится.
3 Пилот перемещает джойстик в другую сторону. Управляющий импульс становится короче опорного. Разностный импульс появляется на нижнем выводе компаратора и через УВХ отпирает ключи 2 и 4 моста. Мотор начинает крутить через редуктор качалку и потенциометр обратной связи, но уже в другую сторону до тех пор, пока длительности импульсов опять не сравняются.
4 Пилот не трогает передатчик. Руль модели, воспринимая нагрузку во время движения, стремится повернуть качалку сервомашинки. При этом изменяется длина опорного импульса, разностный импульс с компаратора через УВХ открывает пару ключей моста так, что мотор передает на редуктор момент, препятствующий повороту качалки внешней силой. Происходит силовое удержание положения качалки.
Мы рассмотрели принцип работы сервомашинки в первом приближении. В действительности все не так просто. Например, что произойдет, если на сервомашинку поступит некорректный сигнал? К примеру, импульс длительностью 3 мс от помехи. В этом случае поведение сервомашинки зависит от алгоритмов, заложенных в управляющей плате. Цифровые машинки проверяют входной сигнал на корректность, и “неправильный” сигнал отрабатывать не будут. Простейшие платы управления, структура которых дана в этой главе, начнут отрабатывать “неправильную” команду. Сервомеханика загонит выходной вал до упора, и будет держать сервомотор под напряжением, пытаясь продвинуть его дальше. Поломки, как правило, не произойдет, но бортовой аккумулятор начнет интенсивно разряжаться. Другие тонкости мы рассмотрим позднее.
Дрожание (Jitter) и “мертвая зона” сервомашинок
Чтобы рассмотреть более детальные характеристики сервомашинки рассмотрим ее работу во втором приближении. Для этого обратимся к графику перекладки руля:
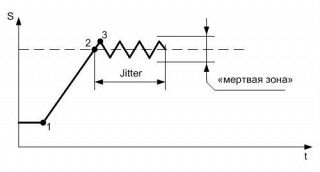
На графике, как это принято в школе S - путь перекладки (или расход руля), t - время. В момент 1 приходит команда на перекладку руля и сервомашинка начинает ее отработку. В момент 2 длительности управляющего и опорного импульсов в управляющей электронике сервомашинки сравниваются. Но механика имеет свойство инерции и проскакивает это значение. В точке 3 управляющая электроника отрабатывает мотором назад и все повторяется. В результате наблюдается дрожание качалки возле положения, требуемого управляющим импульсом. Это дрожание за рубежом получило название jitter. Для борьбы с ним в электронику вводится зона нечувствительности к погрешности позиционирования. Технически это выглядит так: устройство выборки-хранения, оценивая длительность разностных импульсов после компаратора, воспринимает их малые значения как нули. То есть вводится интервал, в рамках которого изменение управляющего импульса относительно опорного не включает мотор сервомашинки. Эту зону называют еще “мертвой зоной”. Ее величина определяет точность позиционирования качалки сервомашинки относительно джойстика передатчика.
Слишком большая “мертвая зона” - плохо с точки зрения точности управления рулями модели. Слишком малая - появится дрожание, также ухудшающее точность отработки команды и резко повышающее энергопотребление сервомашинкой. Ее допустимая величина определяется точностью выполнения механики редуктора сервомашинки и совершенством управляющей электроники. Причиной дрожания исправной сервомашинки может быть выход питающего напряжения за пределы, допускаемые производителем. Это является следствием того, что силовые и скоростные параметры сервомашинки зависят от напряжения ее питания. Производитель оптимизирует параметры управляющей электроники под заданный интервал, находя компромисс между точностью отработки и отсутствием дрожания. За его пределами, “мертвая зона” может возрасти - не очень страшно, а может и уменьшиться, - появится дрожание. Еще дрожание может быть спровоцировано вибрацией мотора модели, особенно на холостом ходу. Величину “мертвой зоны” производители в характеристиках не приводят - скромничают. Чаще всего эта характеристика косвенно указывается качественными понятиями:
+ Стандартная
+ Высокоточная
+ Прецизионная
Обычно, эта характеристика оценивается “крутизной” производителя. Но и тут сравнивать сервомашинки разных производителей трудновато. Не всегда принцип: “чем дороже, тем лучше” действует на самом деле.
Какая точность сервомашинки нужна?
Точность никогда не бывает лишней, - это мы знаем из рекламы. Но точность стоит денег. Поэтому, хотелось бы знать, для каких моделей, какая точность сервомашинок требуется. Фактором, определяющим необходимую точность отработки команд, является точность позиционирования пальцев пилота. Это, в свою очередь, зависит от его мастерства и опыта. Но есть и другие, не менее важные моменты, влияющие на требования к точности сервомашинок. Один из них, - масштабирование пути перекладки (расхода) сервомашинок, мы рассмотрим на примере управления рулем высоты обычной модели самолета и самолета для экстремального пилотажа. Вот так выглядит схема управления рулем высоты обычной модели:
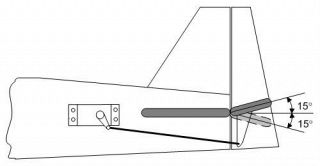
При площади руля высоты, составляющей 1/3 от площади стабилизатора, обычно достаточно углов отклонения руля высоты в пределах +-15 градусов. Поскольку качалка сервомашинки имеет диапазон поворота +-45 градусов, то плечо на качалке делают втрое меньше, чем плечо кабанчика руля высоты. Допустим, мы поставим стандартную сервомашинку с точностью позиционирования около 1% (не самая лучшая сервомашинка). То есть, на качалке угловая погрешность составит около одного градуса, а на руле, - втрое меньше: 0,3 градуса. Будем считать, что такая точность приемлема для обычного полета. Теперь посмотрим, как все это выглядит на самолете для экстремального пилотажа:
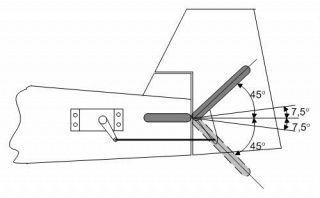
Экстремальный пилотаж - это выполнение фигур на очень маленьких скоростях полета, когда эффективность рулей резко падает. Чтобы сохранить управляемость модели, резко увеличивают площадь рулей и углы их отклонения. Допустим, руль высоты имеет площадь 2/3 от площади стабилизатора, а диапазон его поворота составляет +-45 градусов. Чтобы можно было летать с таким рулем и на обычных скоростях, в передатчике используют функцию ограничения пути перекладки. Посчитаем, каково должно быть масштабирование. Чтобы обеспечить управляемость второго самолета, аналогичную первому на нормальных скоростях необходим диапазон перекладки руля +-7,5 градусов - поскольку площадь руля второго самолета вдвое больше, чем у первого. Поэтому функцию Dual-rate руля высоты для обычного полета задают в размере 17%. То есть, полному пути перекладки джойстика передатчика, соответствует путь перекладки руля вшестеро меньший, чем на полном ходу (то есть с полным расходом рулей). Посмотрим, что происходит с точностью позиционирования. Если поставить на такой самолет ту же сервомашинку, что и в первом случае, то угловая погрешность преобразовывается так: плечи качалки и кабанчика руля высоты должны быть одинаковыми, поскольку углы их поворота одинаковы по 45 градусов в обе стороны. Поэтому на руле погрешность останется 1 градус. Поскольку руль второго самолета вдвое больше, чем у первого, такая погрешность эквивалентна 2 градусам ошибки в пересчете на аэродинамический эффект от руля. С такой точностью летать очень трудно, почти невозможно. Модель не будет нормально возвращаться в прямолинейный полет после отпускания ручек. Это эквивалентно плавающему триммированию, то есть оттриммированая модель после каждого маневра будет требовать корректировки триммеров.
На обычных скоростях при ограничении пути перекладки эквивалентная точность позиционирования джойстика передатчика возрастает в шесть раз за счет масштабирования. Поясним это подробнее. Допустим, в первом самолете пальцы пилота ошибаются на градус угла поворота джойстика. Эта ошибка передается на качалку сервомашинки - тоже один градус, и на руль - 0,3 градуса. То есть точность пилота равна точности сервомашинки, они вносят сопоставимый вклад в ошибки управления, что вполне приемлемо. Во втором самолете при ограничении пути перекладки в шесть раз погрешность пилота на качалке составит уже 0,17 градуса, столько же и на руле. В этом случае точность пилота вшестеро выше точности сервомашинки. Здесь мастерство пилота пропадет невостребованным, потому что ошибки управления будут определяться бортовым оборудованием.
Подытожим сказанное. Чтобы второй самолет в обычном полете летал также как первый, точность отработки сервомашинки на нем должна быть в шесть раз выше. Шесть получается так: в три раза по угловой ошибке и вдвое по аэродинамической эффективности руля. Стоить такая сервомашинка будет в 3-5 раз дороже, но такова плата за многорежимность самолета.
Динамика работы сервомашинки
В этой главе мы рассмотрим работу сервомашинки в третьем приближении. Те, кому надоело читать про тонкости работы сервомашинок, могут эту главу смело пропустить, запомнив для себя лишь то, что сервомашинки с coreless моторами - это “круто”. А почему, мы постараемся здесь рассказать.
Обратимся вновь к временной диаграмме перекладки качалки сервомашинки с “умной” электроникой:
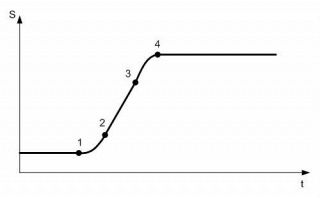
В точке 1 поступает команда на перекладку качалки. Мотор начинает раскручиваться и в точке 2 достигается маршевая скорость перекладки. В точке 3 “умная электроника” понимает, что надо тормозить и реверсирует мотор. Время торможения будет меньше времени разгона, потому что внешняя сила и силы трения при торможении помогают, а при разгоне мешают мотору. Если электроника настроена правильно, то в точке 4 мотор остановится, а длительности управляющего и опорного импульсов сравняются. Таким образом, суммарное время перекладки качалки складывается из времени разгона, времени перекладки с постоянной скоростью и времени торможения. Время перекладки с постоянной скоростью зависит от мощности мотора. Оно важно при большом пути перекладки. При малых отклонениях руля большое значение приобретает время разгона и торможения, поскольку суммарное время малых перемещений может только из них и складываться.
Почему так важны именно малые перемещения качалки?
Здесь мы сделаем небольшое отступление от темы и обратимся к динамике поведения модели. С точки зрения устойчивости в движении модель может находиться в трех положениях: устойчивом, безразличном и неустойчивом. Сначала напомним, как это объясняют в школе. Если шарик поместить на вогнутую поверхность, он будет находиться в устойчивом положении. Отклонив его в сторону и отпустив, вы увидите, как он вернется назад. На плоской горизонтальной поверхности шарик будет в безразличном положении. Если отклонить шарик и отпустить, он останется в новом положении. Установив шарик на выпуклую поверхность, мы получим неустойчивое положение. При этом малейшее отклонение шарика в сторону, порождает силы, стремящиеся его увеличить. Отпустив шарик, вы увидите, как он быстро скатится с поверхности.
Вернемся к моделям. Правильно спроектированный самолет в обычном полете устойчив. Но в некоторых режимах становится неустойчив. К таким можно отнести висение на тяге винта, 3D-фигуру “харриер”. У вертолета управление по курсу хвостовым винтом имеет безразличную устойчивость на висении и неустойчивость по курсу при полете хвостом вперед или по ветру. Автомодель на большинстве режимов устойчива. Кроме управляемого заноса в вираже. Здесь неустойчивость обусловлена тем, что трение покоя, как правило, больше трения скольжения. Пока шины не сорвались в занос (боковое скольжение), они выдерживают большую боковую силу, чем после срыва в занос. Особенность неустойчивого движения в том, что без участия пилота, либо гироскопических систем стабилизации модель не может продолжительное время в нем находится. Вы, наверное, обратили внимание, что перечисленные режимы движения наиболее привлекательны для пилота. 3D-фигуры очень зрелищны, а управляемый занос автомодели позволяет проходить виражи на трассе с минимальным временем. Вертолетом без систем гиростабилизации вообще управлять очень трудно.
Удержание модели в неустойчивом движении происходит маленькими, но очень быстрыми движениями рулей. Время отработки таких движений целиком определяется разгоном и торможением мотора сервомашинки. Сократить это время простым увеличением мощности мотора не получается. Потому что время разгона и торможения мотора зависит от отношения крутящего момента электродвигателя к моменту инерции его ротора. При простом повышении мощности пропорционально растет масса и момент инерции ротора. Это противоречие было разрешено изобретением коллекторного электродвигателя с ротором без сердечника - по-английски coreless. Наиболее распространены сейчас в системах автоматики отечественные электродвигатели серии ДПР:

Здесь магнит статора находится внутри полого колоколообразного ротора. Обмотки ротора соединены с обычным коллектором и скреплены в виде цилиндра специальными смолами. Отличительной особенностью таких моторов является в несколько раз меньший момент инерции ротора, в сравнении с равными по мощности обычными двигателями. Соответственно, время разгона и торможения таких моторов в несколько раз меньше. В сервомашинках coreless-моторы (не серии ДПР, конечно, но устроенные аналогично) начали применять впервые для управления хвостовым винтом модели вертолета. Сейчас они широко применяются для привода других рулей, особенно в комплекте с гироскопом. Такие сервомашинки имеют только один минус - они существенно дороже. Однако переход от обычных моторов к coreless-моторам дал больший качественный скачок в развитии сервомашинок, чем переход от аналоговой управляющей электроники к цифровым сервомашинкам.
Помимо улучшения динамических параметров, coreless-моторы существенно повышают точность сервомашинок. Обусловлено это следующим. Выше отмечалось, что “умная” электроника заранее распознает, когда надо начинать тормозить, чтобы окончание торможения совпало с требуемым окончанием пути перекладки качалки. В сервомашинках с coreless-мотором этот промежуток времени намного меньше, чем у обычных. А значит, можно без опасения эффекта дрожания значительно уменьшить “мертвую зону” и повысить точность отработки.
Пример оценки требуемого момента сервомашинки
Прежде, чем дать методику оценки отметим, что в моделировании многие силовые расчеты прочности и управляемости основаны не на штатных режимах эксплуатации, а на стойкости к аварийным ситуациям. Поэтому многократные прочностной и силовой запасы весьма характерны для моделей.
Теоретические основы расчета шарнирных моментов рулей самолета подробно описаны во многих учебниках по аэродинамике самолета. Мы воспользуемся монографией А.М. Мхитаряна “Аэродинамика”. Шарнирный момент руля определяется по формуле: M=m*S*b*p*V 2/2 (стр. 358 монографии). Здесь обозначены:
S - площадь руля
b - хорда руля
p - плотность воздуха (0,125 кг*сек 2/м 4 для стандартной атмосферы)
V - скорость полета
m - коэффициент момента.
Коэффициент момента зависит от угла отклонения руля и от угла атаки основной аэродинамической поверхности, на которой находится руль, то есть крыла для элеронов, киля для руля направления и стабилизатора для руля высоты. Поскольку нам нужно посчитать лишь максимальный требуемый момент, можно упростить данную зависимость и линейно аппроксимировать график (стр. 359 упомянутой монографии) простой формулой m=0,005d, где d - это угол максимального отклонения руля в градусах. При таком упрощении и пренебрежении зависимостью шарнирного момента от угла атаки погрешность расчета не превысит 30%, что вполне допустимо для оценочного расчета. Для удобства расчетов преобразуем размерность величин в формуле в удобную для использования. Итак, если площадь руля измерять в квадратных дециметрах, хорду руля в сантиметрах, скорость полета в километрах в час, угол отклонения руля в градусах, а получающийся шарнирный момент в граммах на сантиметр, то формула примет такой вид: М=0,00024*S*b*d*V 2. Для примера, рассчитаем момент, необходимый для управления рулем высоты типичной тренировочной модели самолета, задавшись следующими параметрами: площадь руля высоты - 2,5 кв. дециметра, хорда руля - 5 сантиметров, скорость полета 100 километров в час и угол отклонения - 20 градусов. Подставляя значения в формулу, получим: М=0,00024*2,5*5*20*100 2. Вычислив, получим М=600 грамм на сантиметр, то есть 0,6 кГ/см. Вас, наверное, удивит такое маленькое значение. Чтобы пересчитать требуемый момент сервомашинки, надо учесть передаточное отношение силовой проводки, равное отношению плеча качалки сервомашинки к плечу кабанчика руля. Полученный в расчете шарнирный момент руля нужно умножить на это отношение. По нашему расчету получается, что даже с двукратным запасом на руль высоты такой модели подойдет типовая сервомашинка формата микро (0,6кг/см). И это действительно так. Но вот целесообразно ли это делать - здесь вступает в силу замечание, сделанное в начале главы. И еще. Если рассчитать усилия самолета для экстремального пилотажа из главы по требуемой точности сервомашинок, Вы получите значение в 8 раз большее (вдвое большая площадь руля, его хорда и передаточное отношение 1:1)! То есть при двукратном запасе требуется уже 4,8 кг/см - этого стандартная сервомашинка уже не потянет. Придется ставить дорогую сервомашинку, либо две стандартных, - каждую на свою половинку руля высоты. Теперь Вам понятно, что для многорежимного самолета требования и по точности и по моменту сервомашинок во много раз выше, чем для обычных тренировочных самолетов.
Два слова о весовой нагрузке. В примере со вторым, “крутым” самолетом руль высоты вполне может весить 50 грамм, что на плече в половину хорды - 5 см даст дополнительный момент от силы тяжести 0,25 кг/см - немного. Но это в прямолинейном полете. При выполнении угла прямоугольной петли перегрузка может достичь значения 10, и тогда весовой момент составит уже 2,5 кГ/см. Этот момент для прямой петли направлен в ту же сторону, что и аэродинамический момент. Вместе пиковая нагрузка даст 7,3 кг/см! Такого даже две стандартные сервомашинки не выдержат.
Приведенная методика расчета годится только для оценки требований к используемым сервомашинкам и не учитывает аэродинамической и весовой компенсации рулей. В действительности необходим значительный (хотя бы двукратный) запас, который, как известно, карман не тянет, но денег стоит.
Напоследок обратите внимание на то, что скорость полета в формуле момента стоит в квадрате. То есть увеличение скорости с 100 км/час до 140 км/час удваивает нагрузки на рули!
Заключение
В начале статьи мы отмечали, что сервомашинка является третьим непременным элементом аппаратуры радиоуправления. А можно ли сделать радиоуправляемую модель без сервомашинок? Оказывается, можно. Прежде всего, это двухмоторные гусеничные модели - танки, трактора, и двухмоторные катера. В них управление по курсу осуществляется изменением отношения оборотов бортовых двигателей через регуляторы хода. Без сервомашинок здесь можно обойтись. Но есть и радиоуправляемые летающие модели самолета и вертолета где не используются сервомашинки вообще. Хотя, скорее, это уже курьез.
Счастлив тот кто не врёт, кто придуманным живёт
Автор статьи Владимир Васильков (Vovic)
Взято: http://www.rcdesign.ru [rcdesign.ru]
Введение
Данная статья посвящена непременному элементу аппаратуры радиоуправления - рулевым машинкам. Такое название закрепилось за исполнительными механизмами в эпоху “железного занавеса”. На европейских языках их называют коротко - “servo”. Чтобы было понятно и патриотам и космополитам, будем называть их сервомашинками. Сервомашинки устанавливаются на радиоуправляемой модели. Их задача - преобразовать сигнал от приемника в движение рулей модели, согласно действием пилота.
Ведущие производители аппаратуры радиоуправления выпускают большую номенклатуру сервомашинок, по нескольку десятков каждый. В этой статье дается представление, как устроена сервомашинка, как она работает, чтобы помочь в правильном выборе нужного изделия для вашей модели. В первой половине статьи рассказываются азы и описываются основные виды сервомашинок. Во второй половине содержится объяснение принципов работы сервомашинок и ряд тонкостей, которые при отсутствии интереса можно опустить и не читать.
Устройство сервомашинки
Современные сервомашинки имеют довольно однотипную конструкцию:
Все элементы сервомашинки смонтированы, как правило, в полистироловом корпусе, состоящем из основания, верхней и нижней крышек. В полости под верхней крышкой смонтирован редуктор, состоящий из 4-6 шестеренок с зубьями разного модуля. В основной части смонтирован мотор, потенциометр обратной связи и размещена плата управления. Корпус сервомашинки имеет по бокам два ушка с отверстиями для крепления на модели. Элементы корпуса стянуты между собой по углам четырьмя длинными шурупами. Для защиты от вибрации сервомашинки крепятся на модели не жестко, а через специальные резиновые втулки с латунными гильзочками.
На выходном валу редуктора, выступающего из верхней крышки, на шлицах винтом (шурупом) закреплена качалка, которую посредством тяги механически соединяют с рулем модели. Собственно, поворот качалки и будет преобразовываться в механическое движение руля. Сам поворот качалки разные моделисты называют по-разному. Широко распространен термин “расход машинки”. Известен также и “путь перекладки качалки/руля”. В дальнейшем чаще употребляется последний термин, хотя привыкшие к расходам рулей могут именно их и воспринимать там, где написано “путь перекладки” и “поворот качалки”.
В качестве приводного мотора в сервомашинках используются коллекторные электродвигатели постоянного тока. На плате управления собрана вся электронная схема, базирующаяся на специализированной микросхеме. Плата соединена с приемником трехпроводным кабелем, который выходит из корпуса сервомашинки через специальное отверстие.
Конструктивные разновидности сервомашинок
Широкая номенклатура сервомашинок обусловлена разными требованиями к ним, зависящими от модели, где они применяются. Прежде всего, модели различаются габаритами. С этого и начнем. Для моделей-гигантов выпускаются сервомашинки формата (размера) “гигант”:
Они обладают большой мощностью, моментом и прочностью механики. Вес и габариты - тоже не маленькие.
Наиболее распространены сервомашинки стандартного формата:
В этом формате выпускаются и самые дешевые, и самые дорогие сервомашинки. Наиболее мощные из них перекрывают по моменту и мощности сервомашинки формата гигант, имея существенно меньшие габариты и вес. Но вот цена при этом, к сожалению, больше. В размерах, близких к стандарту выпускаются низкопрофильные сервомашинки:
Их удобно закреплять непосредственно на крыле для управления элеронами.
Для небольших моделей выпускаются сервомашинки формата мини:
По силовым характеристикам они часто не уступают обычным сервомашинкам стандартного формата, но имеют меньший вес и габариты.
В связи с бурным развитием летающих моделей паркового класса и комнатных, где очень важен каждый грамм бортового оборудования, выпускается гамма сервомашинок форматов “микро”, “нано” и “пико”:
О мощности здесь говорить не приходится, поскольку нагрузки на рулях таких моделей ничтожные.
Теперь вернемся к содержимому сервомашинок. Начнем с наиболее уязвимого при авариях узла, - с редуктора. Редукторы, как уже говорилось выше, содержат 4-6 шестеренок, и бывают пластиковыми или металлическими. Впрочем, даже в последнем случае, часто вторая и третья от мотора шестеренки все-таки пластиковые.
Металлические (латунные, иногда алюминиевые) шестерни обладают на порядок большей ударной прочностью зубьев. То есть, их живучесть при авариях намного выше, чем у пластиковых шестеренок. Но они существенно дороже и несколько тяжелее. Многие модели сервомашинок выпускаются в двух вариантах: с пластиковыми и металлическими шестернями. В названии сервомашинки с металлическими шестернями добавляют буквы MG (Metal Gear). Помимо цены, такие машинки имеют еще один недостаток. На моделях с высоким уровнем вибраций со временем на зубьях шестерен возникает наклеп и как следствие - люфт редуктора. Но это только после многолетней работы. Пластиковые шестерни таким эффектом не страдают, погибая зачастую намного раньше в авариях.
Для борьбы с люфтами редуктора, которые прямо влияют на точность позиционирования качалки, а также могут порождать на летающих моделях флаттер рулей, выходной вал сервомашинки устанавливают на шарикоподшипники. Такие сервомашинки имеют в названии буквы ВВ (Ball Bearing). Особенно полезно применение такой опции на моделях с большим уровнем вибраций, поскольку обычные втулки скольжения выходного вала сервомашинки довольно быстро разбалтываются, и возникает люфт. Недостаток опции - цена. Многие производители выпускают набор деталей, позволяющих самому переделать стандартную сервомашинку. В набор входит новая верхняя крышка корпуса и шарикоподшипники:
Для высокомощных сервомашинок с металлическим редуктором выпускаются качалки повышенной прочности из стеклопластика или из металла:
Кстати, имейте в виду, что у разных производителей количество зубьев на выходном валу редуктора может отличаться. Поэтому, если вы решите докупать качалки отдельно, убедитесь, что они подходят к сервомашинке.
Передаточное отношение редукторов сервомашинок колеблется в диапазоне 200-400. В стандартной и очень распространенной модели HS422 оно равно 271. Произведение момента сервомашинки на скорость перекладки равно мощности мотора. Разные варианты применения сервомашинок имеют зачастую противоположные приоритеты использования этой мощности. Поэтому многие модели сервомашинок выпускаются в двух конструктивных вариантах: Вариант High Speed имеет меньшее передаточное отношение редуктора и как следствие - меньший момент на валу, но более высокую скорость перекладки. Вариант High Torque имеет большее передаточное отношение редуктора и как следствие - больший момент и меньшую скорость перекладки. Остальные детали таких “близнецов” никак не отличаются. Цена - тоже. В каталогах они различаются соответствующими надписями и цифрами в индексе.
В сервомашинках используются коллекторные моторы, как правило, с трехполюсным ротором и возбуждением от постоянного магнита. Встречаются и пятиполюсные роторы, но реже, и в основном, на мощных сервомашинках. Отдельно стоят сервомашинки с coreless-мотором (мотор с полым ротором). О них подробнее написано в главе о динамике работы сервомашинки. Они скоростные и высокоточные. Но и стоят намного дороже. Их применение оправдано, к примеру, в системах с гироскопами. Во многих других случаях все, как обычно, упирается в деньги.
Потенциометр обратной связи - деталька неказистая, но очень важная. После редуктора, страдающего в основном при авариях, она занимает второе место при определении ресурса и надежности сервомашинки. В потенциометре по специальной пленке из резистивного материала скользит бегунок с токосъемником. Когда он протирает пленку насквозь, - сервомашинка отказывает. Чаще всего, протирка происходит в нейтральном положении качалки из-за вибраций модели. Для увеличения ресурса потенциометра сейчас практически на всех сервомашинках используют непрямой привод оси потенциометра, - когда между нею и выходным валом сервомашинки помещена эластичная втулка. Кроме того, потенциометры имеют по несколько (на дорогих сервомашинках до шести) токосъемных проволочек в параллель, и каждая бежит по своей дорожке на резистивной пленке. В этом случае отказ будет тогда, когда протрутся все дорожки в одном месте. Проверить исправность потенциометра можно, подав на сервомашинку медленно и плавно изменяющуюся команду на перекладку из одного крайнего положения в другое. При этом надо придерживать качалку пальцами. Если она движется плавно, без рывков и замираний - все в порядке.
Если сервомашинку зальет водой или грязью, потенциометр надо чистить спиртом, редуктор промывать и смазывать специальной силиконовой смазкой, применяемой в видеомагнитофонах. Для случаев, когда грязи и воды избежать невозможно, выпускаются сервомашинки в специальном водозащитном исполнении:
Как показывает опыт автора, в таком исполнении сервомашинка выдерживает кратковременное погружение в воду на глубину до метра. В ней выходной вал имеет миниатюрную резиновую манжету, а во все сочленения корпусных деталей и под стягивающие шурупы заложены резиновые прокладки. Выход кабеля из корпуса уплотнен силиконовым герметиком.
Корпуса большинства сервомашинок однотипны. Исключение составляют высокомощные скоростные сервомашинки с цифровой управляющей электроникой, предназначенные для работы с гироскопами. Там на силовой части электроники рассеивается такая мощность, что часть корпуса сервомашинки делают из алюминия с оребрением, которое выполняет функцию радиатора охлаждения:
И, наконец, различия в платах управления. Изначально, электроника рулевых машинок строилась на аналоговых элементах. Но с развитием элементной базы появились так называемые “цифровые” сервомашинки, которые содержат в себе микроконтроллер. Благодаря этому стало возможным использовать более сложные алгоритмы управления, улучшающие параметры сервомашинок, а также подстраивать эти параметры программным способом под специфичные условия. Впрочем, здесь я углубляться не буду, а лишь упомяну, что некоторые сервомашинки (не только цифровые) способны работать с большей частотой управляющих сигналов. То есть, за секунду они способны отработать не 50 управляющих импульсов, а 70-150, и до 270. Это необходимо для уменьшения времени реакции в системах с гироскопом. Подробнее об этом можно почитать в статье по цифровым машинкам и в главе по динамике работы сервомашинки.
Специализированные сервомашинки
Помимо сервомашинок общего применения, выпускаются и специализированные изделия. Прежде всего, это сервомашинки для уборки-выпуска шасси на летающих моделях:
Эти сервомашинки имеют гораздо большее передаточное отношение редуктора, из-за чего они намного медленнее и имеют больший крутящий момент, в сравнении с обычными. Диапазон угла поворота их качалки также больше: 150-180 градусов. Усилие удержания у них, как правило, больше прочности качалки. Есть два варианта электроники таких сервомашинок, обычная пропорциональная с потенциометром обратной связи и дискретная. В последнем случае качалка имеет только два фиксированных положения во включенном состоянии.
Для управления парусами яхт используются шкотовые лебедки, представляющие собой сервомашинку с многооборотным выходным валом. Вместо качалки на валу закреплен шкотовый барабан:
Мощность мотора такой лебедки много больше и питаются они часто от специального шкотового аккумулятора повышенного напряжения. Диапазон поворота барабана 3 - 5 полных оборотов. Для регулирования усилия на шкоте используют сменные барабаны разного диаметра.
К специализированным сервомашинкам можно отнести изделия для автомоделей среднего и крупного масштаба. От обычных их отличает повышенная мощность мотора, питание от силового аккумулятора и высокая прочность механики к ударным нагрузкам.
Основные характеристики сервомашинок
Базовыми техническими характеристиками сервомашинок являются момент на выходном валу и скорость поворота качалки. Момент измеряют в кг/см (хотя по системе СИ надо бы в Н/метр). Момент в 3 кг/см означает, что сервомашинка будет тянуть тягу, шарнирно закрепленную на качалке в 1 сантиметре от ее оси с силой в 3 кг. Соответственно, если тягу закрепить на качалке в 2 сантиметрах от оси, то сила составит только 1,5 кг. То есть, произведение силы в кг на плечо качалки в см - это и есть момент.
Для мощных сервомашинок помимо крутящего момента указывают еще момент силового удержания, который намного больше. При повороте силы трения в редукторе мешают мотору, поэтому и момент меньше. А при силовом удержании силы трения редуктора работают совместно с мотором, поэтому этот момент больше. Кстати, разделив разность этих моментов пополам, можно оценить потери редуктора на трение в конкретной сервомашинке.
Англо-американский мир, к сожалению, пьет пиво не литрами, как мы, а пинтами. Соответственно и момент сервомашинок они измеряют не в кг/см, а в oz.-in, то есть в унциях на дюйм. Учитывая, что в дюйме 2,54 сантиметра, а унция тянет на 28,35 грамм, можно посчитать, что момент в 3 кг/см эквивалентен 41,66 oz.-in. Неудобно, конечно, пересчитывать, но что делать?
Скорость поворота качалки оценивают по времени, требуемом для ее поворота на определенный угол. Например, 0,20с/60градусов. Слава создателю, англо-американский мир не придумал ничего вместо секунд и градусов. Эту характеристику пересчитывать не надо. Разные производители указывают разные углы поворота качалки, зачастую по рекламным соображениям. Согласитесь, что 0,15с/45градусов выглядит более привлекательно, чем 0,20с/60градусов, а ведь это одно и тоже.
В школе по физике вы проходили, что произведение момента на угловую скорость это мощность. В нашем случае - мощность мотора сервомашинки, за вычетом потерь в редукторе. Какая же мощность, и для каких применений нужна? Пример силового расчета сервомашинки для самолета приведен во второй половине статьи. Здесь приведена лишь как ориентир стандартная сервомашинка, типичные характеристики которой даны выше в качестве примеров. Таких машинок хватает для большинства начинающих моделистов и их моделей. К тому же они самые дешевые.
Чаще всего, сервомашинки питаются тем же напряжением, что и приемник на модели - 4,8 вольт от батареи из четырех NiCd или NiMH аккумуляторов. Очень многие сервомашинки (но не все!) можно питать от повышенного напряжения в 6 вольт от батареи из пяти аккумуляторов. При этом мощность мотора возрастает (она пропорциональна квадрату напряжения). Соответственно, момент на выходном валу возрастает, а время поворота качалки- снижается, то есть сервомашинка становится более скоростной. Производители часто указывают момент и время поворота для обоих питающих напряжений. Повышение напряжения питания, если это разрешено производителем, как правило, ресурс сервомашинки заметно не снижает. Для некоторых изделий производитель не рекомендует, или даже запрещает использование повышенного напряжения питания. Почему, - мы рассмотрим ниже.
Управляющая электроника потребляет незначительный ток: 8-10 мА. Вроде немного. Но шесть сервомашинок на планере за час парения с неподвижными рулями (в жизни так не бывает!) сожрут 60 мА/часов. Этот расход тоже надо учитывать. В момент поворота с усилием, близким к максимальному мотор потребляет, в зависимости от мощности 0,5 - 2 ампера. Это потребление сильно зависит от потерь в силовой проводке от качалки сервомашинки до руля. В том числе, и от потерь в петлях руля. Широко распространенные боудены - гибкая тяга (трос) в оболочке при ее значительных изгибах могут стать виновником стремительной разрядки бортового аккумулятора. Его энергия через мотор сервомашинки пойдет на преодоление трения в боудене. При питании сервомашинки повышенным напряжением растет также и потребляемый ее мотором ток. Это также надо учитывать при определении необходимой емкости бортового аккумулятора. Еще для оценки энергопотребления важно учитывать, в каком режиме находится сервомашинка с неподвижным рулем. Если в статике, - то мотор не потребляет тока. А вот если в режиме силового удержания, - то тут аккумулятор разряжается тоже очень быстро. Это характерно для тугого руля с пружинящей тягой.
Несколько слов про питание сервомашинок на моделях с электроприводом. На них часто отсутствует отдельный аккумулятор для питания приемника и сервомашинок. Вместо него в регулятор хода встраивают стабилизатор бортового питания - ВЕС-система, который напряжение ходового аккумулятора преобразует в пятивольтовое питание. С одной стороны это удобно, нет лишнего веса. Но в этом случае надо осторожно подходить к применению на модели мощных сервомашинок, особенно цифровых. Дело в том, что нагрузочная способность ВЕС-стабилизатора, как правило, невелика, от 1,5 до 3 ампер, что обусловлено применением в ВЕС обычного параметрического стабилизатора. Теперь представим, что на модели стоит три сервомашинки, в пике потребляющие по 1,5 ампера. Тогда даже при 3-амперном ВЕС-стабилизаторе будет провал питающего и приемник (!) напряжения. А это уже чревато потерей модели. Одним из способов обезопасить модель от таких проблем, может служить буферное (резервное) питание бортовой электроники от отдельного миниатюрного аккумулятора с развязкой от ВЕС-стабилизатора через диоды Шоттки. Подробнее об этом можно почитать у Карла Шульца на его сайте.
И еще. Сервомашинки формата “пико” и “нано” зачастую имеют моторы с КПД, в несколько раз меньшим, чем у обычных сервомашинок. Поэтому, развивая равную мощность с сервомашинкой “микро”, 9-граммовая “нано” может потреблять вдвое больший ток. Это стоит учитывать поклонникам сверхлегких летающих моделей.
Помимо момента и скорости поворота качалки сервомашинки характеризуются таким параметром, как точность отработки команды. Подробнее о природе и значении точности сервомашинок описано во второй половине статьи.
Подведем краткие итоги того, что было сказано в предыдущих разделах.
1 Габариты рулевых машинок варьируются в зависимости от задач, в которых они используются. Самые распространенные машинки - “стандартные” и “микро”. Машинки этих габаритов (формата) позволяют решить большинство задач, с которыми сталкиваются моделисты.
2 Все производители указывают помимо габаритов сервомашинки еще 2 основных параметра: усилие и скорость поворота качалки. Есть еще такое понятие как точность, но явно она обычно не называется.
3 На надежность машинки влияет ее механическая конструкция. Для повышения надежности серво, основную ось ставят на подшипники, а редукторы делают из металла.
4 По исполнению электронной начинки, рулевые машинки бывают обычными и цифровыми. Цифровые машинки позволяют добиться особенно высокой точности управления.
5 Применяя мощные (цифровые) сервомашинки надо позаботиться о достаточном для их энергопотребления питании бортовой электроники.
6 Для дополнительного повышения точности и скорости отработки, в качестве двигателя в сервомашинках могут применяться моторы с полым ротором.
7 Любые дополнительные опции приводят к росту цены рулевой машинки.
Чтобы закончить обзорное знакомство с сервомашинками, скажем несколько слов о конкретных производителях. На российском рынке наиболее представлены три бренда: JR, Futaba и Hitec. Наиболее престижными и надежными до недавнего времени считались первые, но теперь их догнали вторые. Hitec сейчас ведет агрессивную ценовую политику, поставляя сервомашинки не худшего качества, чем первые два производителя, но по меньшим ценам. Но на чемпионатах Hitec вы вряд ли встретите. Фирма KoPropo выпускает лучшие сервомашинки для автомоделей. Упомянем также специализирующуюся на сервомашинках фирму Volz. Ее машинки очень качественные. Очень неплохие сервомашинки, в том числе спаренные в одном корпусе выпускает Multiplex. Правда, на нашем рынке он не очень популярен.
Те, кому интересно, как и почему работает сервомашинка, могут читать дальше. Остальные могут обратиться непосредственно к каталогам и сайтам производителей и дистрибьюторов, чтобы со знанием дела подобрать по деньгам подходящие для вашей модели сервомашинки.
Принцип действия сервомашинки
Рассмотрим, как работает сервомашинка в первом приближении. Из статьи о передатчиках вы знаете, что на сервомашинку от приемника приходит импульсный сигнал с периодом 20 мс и с длительностью от 0,8 до 2,2 мс. Для того чтобы понять, как данный сигнал преобразуется в поворот качалки, мы рассмотрим типовую структурную схему сервомашинки:
Схема состоит из генератора опорного импульса (ГОП), к которому подключен потенциометр обратной связи , компаратора (К), устройства выборки-хранения (УВХ) и силового моста, в диагональ которого включен электромотор (М). (Здесь базы транзисторов-ключей объединены условно).
Управляющий импульс от приемника приходит на компаратор и одновременно запускает генератор опорного импульса. Длительность опорного импульса зависит от положения потенциометра обратной связи, механически соединенного с выходным валом. В среднем положении качалки длительность равна 1,5 мс, в крайних положениях - 0,8 и 2,2 мс соответственно. Управляющий и опорный импульсы сравниваются компаратором по длительности. Разностный импульс появляется на верхнем, либо нижнем выходах компаратора, в зависимости от того, какой из сравниваемых импульсов длиннее. Длина разностного импульса определяет величину рассогласования между “требуемым” и “имеющимся” положением руля модели. Эта величина измеряется и запоминается в виде постоянного потенциала на время цикла управляющего импульса в устройстве выборки-хранения. (Здесь также дано упрощение работы УВХ. В действительности постоянный потенциал открывает ключи лишь при большом разностном импульсе, а при малых его значениях ключами управляет пропорционально удлиненный разностный импульс). Выходы последнего управляют ключами силового моста.
Проследим, как меняются сигналы в разных режимах работы сервомашинки:
1 Положение качалки соответствует положению джойстика на передатчике. При этом длительности управляющего и опорного импульсов в сервомашинке равны. На обоих выходах компаратора нули. Они же хранятся в устройстве выборки-хранения. Ключи обоих плеч моста закрыты, мотор обесточен, качалка сохраняет свое положение.
2 Пилот изменяет положение джойстика так, что управляющий импульс увеличился. Тогда компаратор на верхнем выводе выдаст разностный импульс. Его величина будет запомнена в УВХ. Верхний выход УВХ откроет 1 и 3 ключи моста. На мотор подано напряжение. Он начнет через редуктор поворачивать качалку и соответственно потенциометр обратной связи так, что длительность опорного импульса начнет возрастать. Такое состояние продлится столько циклов управляющего импульса, пока с его длительностью не сравняется длительность опорного импульса. После этого компаратор закроет ключи моста. Мотор остановится.
3 Пилот перемещает джойстик в другую сторону. Управляющий импульс становится короче опорного. Разностный импульс появляется на нижнем выводе компаратора и через УВХ отпирает ключи 2 и 4 моста. Мотор начинает крутить через редуктор качалку и потенциометр обратной связи, но уже в другую сторону до тех пор, пока длительности импульсов опять не сравняются.
4 Пилот не трогает передатчик. Руль модели, воспринимая нагрузку во время движения, стремится повернуть качалку сервомашинки. При этом изменяется длина опорного импульса, разностный импульс с компаратора через УВХ открывает пару ключей моста так, что мотор передает на редуктор момент, препятствующий повороту качалки внешней силой. Происходит силовое удержание положения качалки.
Мы рассмотрели принцип работы сервомашинки в первом приближении. В действительности все не так просто. Например, что произойдет, если на сервомашинку поступит некорректный сигнал? К примеру, импульс длительностью 3 мс от помехи. В этом случае поведение сервомашинки зависит от алгоритмов, заложенных в управляющей плате. Цифровые машинки проверяют входной сигнал на корректность, и “неправильный” сигнал отрабатывать не будут. Простейшие платы управления, структура которых дана в этой главе, начнут отрабатывать “неправильную” команду. Сервомеханика загонит выходной вал до упора, и будет держать сервомотор под напряжением, пытаясь продвинуть его дальше. Поломки, как правило, не произойдет, но бортовой аккумулятор начнет интенсивно разряжаться. Другие тонкости мы рассмотрим позднее.
Дрожание (Jitter) и “мертвая зона” сервомашинок
Чтобы рассмотреть более детальные характеристики сервомашинки рассмотрим ее работу во втором приближении. Для этого обратимся к графику перекладки руля:
На графике, как это принято в школе S - путь перекладки (или расход руля), t - время. В момент 1 приходит команда на перекладку руля и сервомашинка начинает ее отработку. В момент 2 длительности управляющего и опорного импульсов в управляющей электронике сервомашинки сравниваются. Но механика имеет свойство инерции и проскакивает это значение. В точке 3 управляющая электроника отрабатывает мотором назад и все повторяется. В результате наблюдается дрожание качалки возле положения, требуемого управляющим импульсом. Это дрожание за рубежом получило название jitter. Для борьбы с ним в электронику вводится зона нечувствительности к погрешности позиционирования. Технически это выглядит так: устройство выборки-хранения, оценивая длительность разностных импульсов после компаратора, воспринимает их малые значения как нули. То есть вводится интервал, в рамках которого изменение управляющего импульса относительно опорного не включает мотор сервомашинки. Эту зону называют еще “мертвой зоной”. Ее величина определяет точность позиционирования качалки сервомашинки относительно джойстика передатчика.
Слишком большая “мертвая зона” - плохо с точки зрения точности управления рулями модели. Слишком малая - появится дрожание, также ухудшающее точность отработки команды и резко повышающее энергопотребление сервомашинкой. Ее допустимая величина определяется точностью выполнения механики редуктора сервомашинки и совершенством управляющей электроники. Причиной дрожания исправной сервомашинки может быть выход питающего напряжения за пределы, допускаемые производителем. Это является следствием того, что силовые и скоростные параметры сервомашинки зависят от напряжения ее питания. Производитель оптимизирует параметры управляющей электроники под заданный интервал, находя компромисс между точностью отработки и отсутствием дрожания. За его пределами, “мертвая зона” может возрасти - не очень страшно, а может и уменьшиться, - появится дрожание. Еще дрожание может быть спровоцировано вибрацией мотора модели, особенно на холостом ходу. Величину “мертвой зоны” производители в характеристиках не приводят - скромничают. Чаще всего эта характеристика косвенно указывается качественными понятиями:
+ Стандартная
+ Высокоточная
+ Прецизионная
Обычно, эта характеристика оценивается “крутизной” производителя. Но и тут сравнивать сервомашинки разных производителей трудновато. Не всегда принцип: “чем дороже, тем лучше” действует на самом деле.
Какая точность сервомашинки нужна?
Точность никогда не бывает лишней, - это мы знаем из рекламы. Но точность стоит денег. Поэтому, хотелось бы знать, для каких моделей, какая точность сервомашинок требуется. Фактором, определяющим необходимую точность отработки команд, является точность позиционирования пальцев пилота. Это, в свою очередь, зависит от его мастерства и опыта. Но есть и другие, не менее важные моменты, влияющие на требования к точности сервомашинок. Один из них, - масштабирование пути перекладки (расхода) сервомашинок, мы рассмотрим на примере управления рулем высоты обычной модели самолета и самолета для экстремального пилотажа. Вот так выглядит схема управления рулем высоты обычной модели:
При площади руля высоты, составляющей 1/3 от площади стабилизатора, обычно достаточно углов отклонения руля высоты в пределах +-15 градусов. Поскольку качалка сервомашинки имеет диапазон поворота +-45 градусов, то плечо на качалке делают втрое меньше, чем плечо кабанчика руля высоты. Допустим, мы поставим стандартную сервомашинку с точностью позиционирования около 1% (не самая лучшая сервомашинка). То есть, на качалке угловая погрешность составит около одного градуса, а на руле, - втрое меньше: 0,3 градуса. Будем считать, что такая точность приемлема для обычного полета. Теперь посмотрим, как все это выглядит на самолете для экстремального пилотажа:
Экстремальный пилотаж - это выполнение фигур на очень маленьких скоростях полета, когда эффективность рулей резко падает. Чтобы сохранить управляемость модели, резко увеличивают площадь рулей и углы их отклонения. Допустим, руль высоты имеет площадь 2/3 от площади стабилизатора, а диапазон его поворота составляет +-45 градусов. Чтобы можно было летать с таким рулем и на обычных скоростях, в передатчике используют функцию ограничения пути перекладки. Посчитаем, каково должно быть масштабирование. Чтобы обеспечить управляемость второго самолета, аналогичную первому на нормальных скоростях необходим диапазон перекладки руля +-7,5 градусов - поскольку площадь руля второго самолета вдвое больше, чем у первого. Поэтому функцию Dual-rate руля высоты для обычного полета задают в размере 17%. То есть, полному пути перекладки джойстика передатчика, соответствует путь перекладки руля вшестеро меньший, чем на полном ходу (то есть с полным расходом рулей). Посмотрим, что происходит с точностью позиционирования. Если поставить на такой самолет ту же сервомашинку, что и в первом случае, то угловая погрешность преобразовывается так: плечи качалки и кабанчика руля высоты должны быть одинаковыми, поскольку углы их поворота одинаковы по 45 градусов в обе стороны. Поэтому на руле погрешность останется 1 градус. Поскольку руль второго самолета вдвое больше, чем у первого, такая погрешность эквивалентна 2 градусам ошибки в пересчете на аэродинамический эффект от руля. С такой точностью летать очень трудно, почти невозможно. Модель не будет нормально возвращаться в прямолинейный полет после отпускания ручек. Это эквивалентно плавающему триммированию, то есть оттриммированая модель после каждого маневра будет требовать корректировки триммеров.
На обычных скоростях при ограничении пути перекладки эквивалентная точность позиционирования джойстика передатчика возрастает в шесть раз за счет масштабирования. Поясним это подробнее. Допустим, в первом самолете пальцы пилота ошибаются на градус угла поворота джойстика. Эта ошибка передается на качалку сервомашинки - тоже один градус, и на руль - 0,3 градуса. То есть точность пилота равна точности сервомашинки, они вносят сопоставимый вклад в ошибки управления, что вполне приемлемо. Во втором самолете при ограничении пути перекладки в шесть раз погрешность пилота на качалке составит уже 0,17 градуса, столько же и на руле. В этом случае точность пилота вшестеро выше точности сервомашинки. Здесь мастерство пилота пропадет невостребованным, потому что ошибки управления будут определяться бортовым оборудованием.
Подытожим сказанное. Чтобы второй самолет в обычном полете летал также как первый, точность отработки сервомашинки на нем должна быть в шесть раз выше. Шесть получается так: в три раза по угловой ошибке и вдвое по аэродинамической эффективности руля. Стоить такая сервомашинка будет в 3-5 раз дороже, но такова плата за многорежимность самолета.
Динамика работы сервомашинки
В этой главе мы рассмотрим работу сервомашинки в третьем приближении. Те, кому надоело читать про тонкости работы сервомашинок, могут эту главу смело пропустить, запомнив для себя лишь то, что сервомашинки с coreless моторами - это “круто”. А почему, мы постараемся здесь рассказать.
Обратимся вновь к временной диаграмме перекладки качалки сервомашинки с “умной” электроникой:
В точке 1 поступает команда на перекладку качалки. Мотор начинает раскручиваться и в точке 2 достигается маршевая скорость перекладки. В точке 3 “умная электроника” понимает, что надо тормозить и реверсирует мотор. Время торможения будет меньше времени разгона, потому что внешняя сила и силы трения при торможении помогают, а при разгоне мешают мотору. Если электроника настроена правильно, то в точке 4 мотор остановится, а длительности управляющего и опорного импульсов сравняются. Таким образом, суммарное время перекладки качалки складывается из времени разгона, времени перекладки с постоянной скоростью и времени торможения. Время перекладки с постоянной скоростью зависит от мощности мотора. Оно важно при большом пути перекладки. При малых отклонениях руля большое значение приобретает время разгона и торможения, поскольку суммарное время малых перемещений может только из них и складываться.
Почему так важны именно малые перемещения качалки?
Здесь мы сделаем небольшое отступление от темы и обратимся к динамике поведения модели. С точки зрения устойчивости в движении модель может находиться в трех положениях: устойчивом, безразличном и неустойчивом. Сначала напомним, как это объясняют в школе. Если шарик поместить на вогнутую поверхность, он будет находиться в устойчивом положении. Отклонив его в сторону и отпустив, вы увидите, как он вернется назад. На плоской горизонтальной поверхности шарик будет в безразличном положении. Если отклонить шарик и отпустить, он останется в новом положении. Установив шарик на выпуклую поверхность, мы получим неустойчивое положение. При этом малейшее отклонение шарика в сторону, порождает силы, стремящиеся его увеличить. Отпустив шарик, вы увидите, как он быстро скатится с поверхности.
Вернемся к моделям. Правильно спроектированный самолет в обычном полете устойчив. Но в некоторых режимах становится неустойчив. К таким можно отнести висение на тяге винта, 3D-фигуру “харриер”. У вертолета управление по курсу хвостовым винтом имеет безразличную устойчивость на висении и неустойчивость по курсу при полете хвостом вперед или по ветру. Автомодель на большинстве режимов устойчива. Кроме управляемого заноса в вираже. Здесь неустойчивость обусловлена тем, что трение покоя, как правило, больше трения скольжения. Пока шины не сорвались в занос (боковое скольжение), они выдерживают большую боковую силу, чем после срыва в занос. Особенность неустойчивого движения в том, что без участия пилота, либо гироскопических систем стабилизации модель не может продолжительное время в нем находится. Вы, наверное, обратили внимание, что перечисленные режимы движения наиболее привлекательны для пилота. 3D-фигуры очень зрелищны, а управляемый занос автомодели позволяет проходить виражи на трассе с минимальным временем. Вертолетом без систем гиростабилизации вообще управлять очень трудно.
Удержание модели в неустойчивом движении происходит маленькими, но очень быстрыми движениями рулей. Время отработки таких движений целиком определяется разгоном и торможением мотора сервомашинки. Сократить это время простым увеличением мощности мотора не получается. Потому что время разгона и торможения мотора зависит от отношения крутящего момента электродвигателя к моменту инерции его ротора. При простом повышении мощности пропорционально растет масса и момент инерции ротора. Это противоречие было разрешено изобретением коллекторного электродвигателя с ротором без сердечника - по-английски coreless. Наиболее распространены сейчас в системах автоматики отечественные электродвигатели серии ДПР:
Здесь магнит статора находится внутри полого колоколообразного ротора. Обмотки ротора соединены с обычным коллектором и скреплены в виде цилиндра специальными смолами. Отличительной особенностью таких моторов является в несколько раз меньший момент инерции ротора, в сравнении с равными по мощности обычными двигателями. Соответственно, время разгона и торможения таких моторов в несколько раз меньше. В сервомашинках coreless-моторы (не серии ДПР, конечно, но устроенные аналогично) начали применять впервые для управления хвостовым винтом модели вертолета. Сейчас они широко применяются для привода других рулей, особенно в комплекте с гироскопом. Такие сервомашинки имеют только один минус - они существенно дороже. Однако переход от обычных моторов к coreless-моторам дал больший качественный скачок в развитии сервомашинок, чем переход от аналоговой управляющей электроники к цифровым сервомашинкам.
Помимо улучшения динамических параметров, coreless-моторы существенно повышают точность сервомашинок. Обусловлено это следующим. Выше отмечалось, что “умная” электроника заранее распознает, когда надо начинать тормозить, чтобы окончание торможения совпало с требуемым окончанием пути перекладки качалки. В сервомашинках с coreless-мотором этот промежуток времени намного меньше, чем у обычных. А значит, можно без опасения эффекта дрожания значительно уменьшить “мертвую зону” и повысить точность отработки.
Пример оценки требуемого момента сервомашинки
Прежде, чем дать методику оценки отметим, что в моделировании многие силовые расчеты прочности и управляемости основаны не на штатных режимах эксплуатации, а на стойкости к аварийным ситуациям. Поэтому многократные прочностной и силовой запасы весьма характерны для моделей.
Теоретические основы расчета шарнирных моментов рулей самолета подробно описаны во многих учебниках по аэродинамике самолета. Мы воспользуемся монографией А.М. Мхитаряна “Аэродинамика”. Шарнирный момент руля определяется по формуле: M=m*S*b*p*V 2/2 (стр. 358 монографии). Здесь обозначены:
S - площадь руля
b - хорда руля
p - плотность воздуха (0,125 кг*сек 2/м 4 для стандартной атмосферы)
V - скорость полета
m - коэффициент момента.
Коэффициент момента зависит от угла отклонения руля и от угла атаки основной аэродинамической поверхности, на которой находится руль, то есть крыла для элеронов, киля для руля направления и стабилизатора для руля высоты. Поскольку нам нужно посчитать лишь максимальный требуемый момент, можно упростить данную зависимость и линейно аппроксимировать график (стр. 359 упомянутой монографии) простой формулой m=0,005d, где d - это угол максимального отклонения руля в градусах. При таком упрощении и пренебрежении зависимостью шарнирного момента от угла атаки погрешность расчета не превысит 30%, что вполне допустимо для оценочного расчета. Для удобства расчетов преобразуем размерность величин в формуле в удобную для использования. Итак, если площадь руля измерять в квадратных дециметрах, хорду руля в сантиметрах, скорость полета в километрах в час, угол отклонения руля в градусах, а получающийся шарнирный момент в граммах на сантиметр, то формула примет такой вид: М=0,00024*S*b*d*V 2. Для примера, рассчитаем момент, необходимый для управления рулем высоты типичной тренировочной модели самолета, задавшись следующими параметрами: площадь руля высоты - 2,5 кв. дециметра, хорда руля - 5 сантиметров, скорость полета 100 километров в час и угол отклонения - 20 градусов. Подставляя значения в формулу, получим: М=0,00024*2,5*5*20*100 2. Вычислив, получим М=600 грамм на сантиметр, то есть 0,6 кГ/см. Вас, наверное, удивит такое маленькое значение. Чтобы пересчитать требуемый момент сервомашинки, надо учесть передаточное отношение силовой проводки, равное отношению плеча качалки сервомашинки к плечу кабанчика руля. Полученный в расчете шарнирный момент руля нужно умножить на это отношение. По нашему расчету получается, что даже с двукратным запасом на руль высоты такой модели подойдет типовая сервомашинка формата микро (0,6кг/см). И это действительно так. Но вот целесообразно ли это делать - здесь вступает в силу замечание, сделанное в начале главы. И еще. Если рассчитать усилия самолета для экстремального пилотажа из главы по требуемой точности сервомашинок, Вы получите значение в 8 раз большее (вдвое большая площадь руля, его хорда и передаточное отношение 1:1)! То есть при двукратном запасе требуется уже 4,8 кг/см - этого стандартная сервомашинка уже не потянет. Придется ставить дорогую сервомашинку, либо две стандартных, - каждую на свою половинку руля высоты. Теперь Вам понятно, что для многорежимного самолета требования и по точности и по моменту сервомашинок во много раз выше, чем для обычных тренировочных самолетов.
Два слова о весовой нагрузке. В примере со вторым, “крутым” самолетом руль высоты вполне может весить 50 грамм, что на плече в половину хорды - 5 см даст дополнительный момент от силы тяжести 0,25 кг/см - немного. Но это в прямолинейном полете. При выполнении угла прямоугольной петли перегрузка может достичь значения 10, и тогда весовой момент составит уже 2,5 кГ/см. Этот момент для прямой петли направлен в ту же сторону, что и аэродинамический момент. Вместе пиковая нагрузка даст 7,3 кг/см! Такого даже две стандартные сервомашинки не выдержат.
Приведенная методика расчета годится только для оценки требований к используемым сервомашинкам и не учитывает аэродинамической и весовой компенсации рулей. В действительности необходим значительный (хотя бы двукратный) запас, который, как известно, карман не тянет, но денег стоит.
Напоследок обратите внимание на то, что скорость полета в формуле момента стоит в квадрате. То есть увеличение скорости с 100 км/час до 140 км/час удваивает нагрузки на рули!
Заключение
В начале статьи мы отмечали, что сервомашинка является третьим непременным элементом аппаратуры радиоуправления. А можно ли сделать радиоуправляемую модель без сервомашинок? Оказывается, можно. Прежде всего, это двухмоторные гусеничные модели - танки, трактора, и двухмоторные катера. В них управление по курсу осуществляется изменением отношения оборотов бортовых двигателей через регуляторы хода. Без сервомашинок здесь можно обойтись. Но есть и радиоуправляемые летающие модели самолета и вертолета где не используются сервомашинки вообще. Хотя, скорее, это уже курьез.
Счастлив тот кто не врёт, кто придуманным живёт
Офлайн
#20 Сен. 1, 2013 08:12:06
- DimKa
-
-

- Зарегистрирован: 2012-08-30
- Сообщения: 1070
- Репутация:
6
- Профиль Отправить e-mail
Если вы новичёк или как настроить вертолёт!
Полезная статья,много интересного.
Офлайн
Друзья сайта
- www.vipatovo.ru - Ипатовский информационный портал
- www.rc-box.ru - Красноярский форум моделистов.