Заземление вертолётаОговорюсь, что все, что здесь написано есть компиляция моего опыта и изысканий, и не претендует на абсолютную истину. Возможно, что где-то есть аналогичное, или очень похожее описание. Я не Бог, и могу ошибаться.Заземляемся!
Да, да! Именно заземляемся, а не приземляемся. В данном длинном опусе речь пойдет о вертолетах и заземлении. В нашем случае заземление есть не что иное, как соединение потенциально опасных в плане статического электричества частей вертолета между собой и минусом приемника или регулятора. Тем самым мы выравниваем потенциалы и тока вроде как не будет.
Кому больше нравится правильные определения то вот:
«Одна из функций заземления суть есть уменьшение до безопасного значения разности потенциалов между заземляемым проводящим предметом и другими проводящими предметами, имеющими естественное заземление.»
Цинично выдрано из педивикии!
Многие, как начинающие, так и опытные пилоты пренебрегают рядом простых мер, в результате чего потом и страдают.
Неоднократно на форумах встречал сообщения, что приемник внезапно уходит в «фаилсейв», вертолет ведет себя неконтролируемо, и вообще, завелся Барабашка.
Некоторые пилоты проверяют все соединения, меняют батареи питания бортовой электроники, меняют приемники, но, увы и ах, данные меры помогают далеко не всегда. В одном случае, дошло до курьеза: человек выбросил всю аппаратуру бренда А, и купил бренд Б.
В местности, где вы летаете, статическое электричество может себя ни коим образом и не проявить. Но это не значит, что его нет. Например, летом, когда влаги в воздухе больше, вероятность словить «фаилсейв», гораздо ниже, чем зимой, когда воздух очень сухой, и статика скапливается гораздо лучше.
Не миновала и меня чаша сия.Как потом выяснилось, контроллер сгорел от статики. Так мне сообщила служба саппорта Кастл, после того, как получили контроллер. Случай признан не гарантийным. На самом деле, считаю, что инженегры Кастл, допустили ошибку при разработке контроллера. Балка у меня была заземлена, а вот мотораму с мотором заземлить поленился. Летал осенью, температура была ниже нуля. Так что, не следует пренебрегать заземлением. Лучше потратить 50-100 руб. на заземление, чем 50 и более долларов на ремонт вертолета.
Вертолет, как технически сложная машина, имеет множество трущихся и движущихся частей. Эти части не всегда подобраны правильно, и иногда мы имеем классическую электрофорную машину в чистом виде. Так, например, обстоят дела с алюминиевой хвостовой балкой, и движущимся внутри нее ремнем. Некоторые части, о которых мы и не подозреваем, имеют свойство накапливать статический заряд. Например, электромотор. Вращаясь с бешенной скоростью он прогоняет через себя воздух для охлаждения, в воздухе имеется некоторое количество частиц пыли и прочей требухи. Вот они, вместе с молекулами воздуха за счет незначительно трения и создают статический потенциал! А ведь двигатель соединен с сердцем вертолета – контроллером управления мотора! Опасно, однако! В принципе, и основной ротор вертолета имеет способность накапливать статику, но он, как правило, хорошо изолирован от всей остальной электроники. Так как серьезного исследования на тему статики на RC вертолетах, найти мне не удалось, то попробую в меру своего понимания, простыми словами объяснить, что же получается.
Ремень, двигаясь, внутри хвостовой балки, колеблясь, трется о нее. А из школы многие помнят опыт с эбонитовой палочкой и куском шерсти. Когда, потерев палочку о шерсть, мы можем притянуть ей кусочки бумаги. Примерно тоже самое происходит и в паре балка-ремень. Но в связи с тем, что интенсивность трения намного выше, то выше соответственно потенциал. Этот потенциал накапливается, и когда достигается некая критическая разность потенциалов (в другой части вертолета заряд не накапливается), происходит разряд – маленькая молния. И вот эта колоссальная помеха попадает, например, через сервомашинку на балке во все электронные части вертолета, со всеми вытекающими последствиями. Современные процессоры (они установлены практически во всех электронных устройствах вертолета) очень боятся статики, хоть производители и борются с этим, но помогает это далеко не всегда. Вот вам и «фаилсейв»!
А бороться с этим нехорошим явлением очень просто. Достаточно выровнять потенциал, а при равном потенциале, тока и микро молнии не будет. Для этого достаточно соединить хвостовую балку, мотор, а также другие потенциально опасные части с минусом приемника или батареи. Тогда, заряд как бы растечется по всем этим частям, и потенциал будет равным. Данный принцип справедлив как для электро вертолетов, так и для ДВС, как для вертолетов с валом в приводе хвостового ротора, так и с ремнем. Отсутствие статики в вертолетах с валом в приводе хвоста, считаю общепринятым заблуждением. Статика никуда не делась, просто вероятность того, что потенциал достигнет того критического уровня, при котором будет большой БУМ гораздо ниже. Помним, что у нас есть еще и бешено вращающийся мотор, хвостовой и основной ротор.
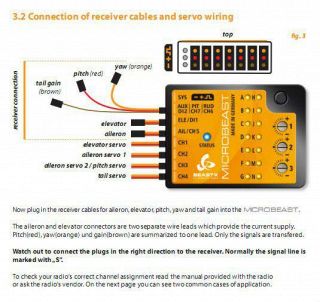
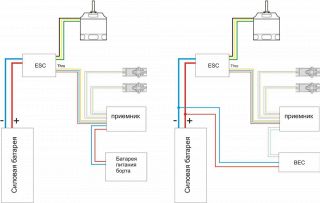
Начну, как обычно издалека. А именно, со схемы соединения бортовой электроники.
Старался как мог, но художник из меня от слова худо. Но принцип, думаю понятен.
Красная линия – это плюсовая шина питания, а синяя – минусовая шина питания. Именно она нас и интересует. На рисунке схема в двух вариациях: с питанием от отдельной бортовой батареи, и с питанием через преобразователь (BEC) от силовой батареи.
Как видно из рисунка, минусовая шина (далее просто минус) общая для всех устройств.
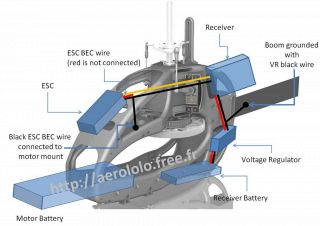
Здесь нужно обратить внимание на то, что спектр оборудования, применяемый на вертолетах, очень большой и возможно бывают устройства и с гальванически развязанным минусом. Как это проверить, я постараюсь объяснить далее. Из всех устройств непосредственной связи с минусом не имеет только мотор. При организации заземления в нашу задачу будет входить следующее (необходимо и достаточно):
* Соединить с минусом хвостовую балку, мотор или мотораму, раму вертолета (если карбон, и только по желанию);
* По возможности не сильно увеличить вес вертолета;
* Не сильно испортить внешний вид.
В общем, не так уж и много требований. Что потребуется из материалов:
Провод, медный, многожильный, в изоляции. Желательно подходящий по цвету. В зависимости от размера вертолета может понадобиться от одного до двух метров. Я брал провод от антенны старого 40МГц приемника;
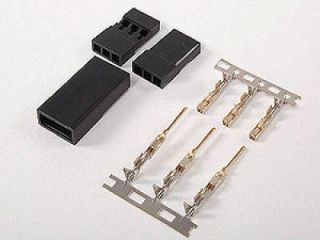
Клеммы. Примерно такого вида как на картинке. Лучше плоские под пайку;
Разъем который вставляется в приемник, минимум 1-2 шт.;
2-3 см термоусадочной трубки. С диаметром предлагаю определиться самим;
Если свободных каналов на приемнике нет, то возможно понадобиться У-кабель.
Картинки цинично дрались из Интернета. Вроде все. Можно приступать к делу.
Самые «злостные» заземляльщики, рекомендуют присоединять заземление к балке в 3-х местах:
В самом конце, как можно ближе к хвостовому редуктору;
В середине, например, там, где крепление подкосов;
У основания – там, где балка вставляется в раму.
Убежден, что если исходить из принципа разумности и достатчоности, то будет достаточно присоединить провод заземления в месте крепления подкосов, и если это необходимо, то и у основания балки. Либо в конце, и у основания. Три точки – это уже лишнее. Я сделал 2 варианта. На ДВС вертолете в 2-х местах, на электро вообще в одном, там, где крепятся подкосы. Но если есть желание можно перестраховаться. Почему именно там, где крепятся подкосы? Это самое удобное место для крепления, плюс ко всему, крепление подкосов у многих вертолетов расположено не в середине балки, а ближе к концу, т.е к хвостовому редуктору. А это, как уже известно самое «статическое» место. В моем случае вертолет не типовой, и заземлять будем не на крепление подкосов, а на крепление хвостового оперения. Пусть некоторые фото Вас не смущают, смысла они не меняют.
Пошаговая инструкция для 450-го вертолета.
* Желательно, проверить тестером, что минус регулятора «сквозной», т.е минус силовой батареи соединен с минусом разъема «газ». Для этого включаем тестер на проверку сопротивления, и одним щупом подключаемся на минус силового разъема, а вторым щупом на минусовой провод разъема газа. В идеале должно быть «короткое» – очень маленькое сопротивление. Если Вы летаете с внешним BEC, то такую же проверку желательно устроить и ему. Впрочем, данный пункт можно и пропустить. Обычно у BEC такой же сквозной минус как и у других устройств.
* Зачищаем балку в районе хомута крепления подкосов до металла. Это можно делать надфилем, бормашиной, наждачной шкуркой. Главное быть очень осторожным, так как стенки балки имеют очень маленькую толщину, и можно зачистить до дыр. Чем лучше зачистим, тем лучше будет контакт.
* Отмеряем примерно длину провода, с учетом того, как будем его проводить.
* Замеряем проводом балку по окружности.
И зачищаем изоляцию.
* Облуживаем зачищенный конец провода. Если не облудить, то контакт медь алюминий со временем станет плохой, и толку от нашего заземления будет ноль.
* Надежно закрепляем провод по окружности балки, и прижимаем сверху хомутом крепления подкосов. Если есть желание и возможность, то можно провод припаять к балке. Закрепляем подкосы.
Протягиваем провод до приемника. Сделав небольшой, 3-5 см, запас обрезаем лишнее.
Устанавливаем на провод разъем для приемника, так, чтобы наш провод совпадал с минусовой ножкой на приемнике. И вставляем фишку разъема в свободный канал приемника. Все! Балку мы заземлили.
Теперь мотор. Берем нашу клемму. Облуживаем ее.
* Отмеряем провод, с учетом расстояния для его прокладки.
* Припаиваем нашу клемму к проводу, с другого конца надеваем термоусадку, и усаживаем ее.
* Клемму крепим к одному из болтов крепления мотора. Или к мотораме, если она металлическая.
* Протягиваем провод до приемника. Оконечиваем разъемом как в п.8, втыкаем в свободный канал приемника. Если свободных каналов нет, то придется воспользоваться разветвителем (Y-кабель).
* Далее уже вариации на тему. Если есть желание, то можно заземлить и карбоновую раму, только не забыть заземлить обе половинки. Делается все примерно также. Берется клемма, облуживается, к ней припаивается провод. Этот провод соединяем с минусом приемника. Сопротивление самой рамы порядка 10-20 Ом.
* По окончании работ, желательно сделать финальную проверку тестером. Минус силового разъема контроллера, должен прозваниваться на «короткое» с местом заземления балки и мотора.
Как Вы обратили внимание, у меня, все провода заземления получились заведены на минус приемника. Ничего тайного в этом нет, просто так мне было удобнее. Возможно, что это и не совсем правильно с точки зрения теории, но это мне помогло. Да и не очень хочется землить все на минус силовой батареи. Хотя в принципе, если Вам так будет удобнее – можно.
Примечание 1. Если до того, как Вы сделали заземление на своем вертолете, у Вас не было крашей по необъяснимым причинам, то не стоит ожидать каких либо улучшений в работе вертолета. Скорее всего, у Вас и так все было нормально, либо просто Вам везло. Если в процессе Вы испортили что либо, я ответственности не несу. Также, я не несу ответственности за то, что Вы все сделали правильно, а барабашка от Вас не ушел. Вероятно, необъяснимые краши происходили у Вас по иным причинам, нежели статическое электричество.
Примечание 2. Сори, что нет фоток заземления мотора. С фотиком туда не подлезть. Надеюсь словесное описание понятно. На своем вертолете, Kyosho Caliber 450, карбоновую раму я не заземлял. Оказалось необходимым и достаточным сделать заземление вышеуказанным способом, и барабашка перестал меня донимать. Теперь летаю в морозную погоду, столько, сколько смогу, и не жду когда же это произойдет снова.
Примечание 3. Заземление на больших ДВС вертолетах с калильными моторами делается по аналогичному принципу. Единственное отличие, что минусовые клеммы сводятся на картер двигателя.
Взято отсюда:
http://viktor-heli.ru/?p=10 [viktor-heli.ru]














 rogram FilesCastle CreationsCastle LinkCastleLink.exe;
rogram FilesCastle CreationsCastle LinkCastleLink.exe;