
ti=2c недостаточная регулировка
ti=0.6c - то что нужно
ti=0.2 и 0.1 - перерегулировка, есть небольшие осцилляции их вы и будите наблюдать.
NaVeRДля технической сьёмки можно и обойтись,но для художественной просто обязательно .Наклон изображения естественен только для нетрезвого человека.Удержание горизонта -это наше святое.
Есть ли смысл покупать что нибудь подобное Ссылка

rootКруто! Коптер на тени кажется просто гигантским
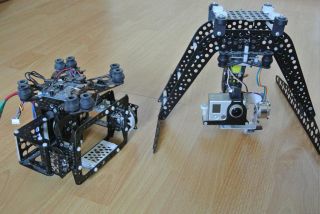
Вот я летал, трикоптер без подвеса, камера закреплена на раме с небольшим виброгасителем.
Где то в середине видео бочку делаю )

Vikto50Я правильно понял, подвесы самодельные? О_о.
Для технической сьёмки можно и обойтись,но для художественной просто обязательно .Наклон изображения естественен только для нетрезвого человека.Удержание горизонта -это наше святое.

Vikto50Не очень понял о чём вы. Если у меня задействовано 4 канала на коптер то почему при 6 канальном пульте не задействовать ещё два под подвес? Зачем аж 9. Простите если глупый вопрос.
Тогда уже необходимо иметь 9 каналов в управлении.
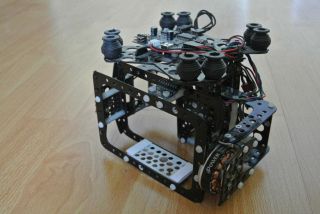
 К полётам готов !
К полётам готов !
rootСпасибо за совет, просто я купил попробовать самое дешёвое что было. Если всё удачно запустится и полетит то буду собирать деньги на что нибудь типо спектрума dx9 или турнижи. Да и наверное нужно прикупить crius aio pro. А то доверять гоупро ккмультикоптеру страшновато))
Вообще крайне рекомендую сменить аппаратуру на другую
rootУчитться на своих ошибках всегда приходится, без этого никуда
Все так делают, в итоге выходит даже дороже т.к. покупаете 2 аппаратуры.
rootЗначит мне нужно свой кук к такому результату приводить, а то я толком не летал ещё, что уж там.
Кстати на моем видео на трикоптере стоит самый первый кук
NaVeRПохоже стабилизация почти не работает .При резком наклоне двигатели должны моментально менять свои обороты.При резких поворотах вокруг оси по горизонту, два двигателя из четырёх должны почти останавливаться, а другие ,наоборот резко набирать обороты.По звуку моторов можно это легко услышать. Если это не так, не стоит даже пробовать взлетать.Поберегите винты.
Ещё есть впечатление что коптер совершенно не “подруливает” при наклоне, по крайней мере я не смог увидеть разницу в скорости вращения движков, хотя наклонял даже градусов на 70 в разные стороны.
Vikto50Если вращать по часовой и против часовой то двигатели тормозятся и правда. При очень резких наклонах они тоже тормозятся (судя по звуку) но совсем не сильно. двигатель кратковременно увеличивает обороты а потом восстанавливает.NaVeRПохоже стабилизация почти не работает .При резком наклоне двигатели должны моментально менять свои обороты.При резких поворотах вокруг оси по горизонту, два двигателя из четырёх должны почти останавливаться, а другие ,наоборот резко набирать обороты.По звуку моторов можно это легко услышать. Если это не так, не стоит даже пробовать взлетать.Поберегите винты.
Ещё есть впечатление что коптер совершенно не “подруливает” при наклоне, по крайней мере я не смог увидеть разницу в скорости вращения движков, хотя наклонял даже градусов на 70 в разные стороны.
NaVeRА другие набирают ли обороты?
то двигатели тормозятся и правда
Vikto50Да, набирают. Но тоже кратковременно. Видимо плата думает что кратковременного ускорния ей хватит для выравнивания?
А другие набирают ли обороты?
Vikto50Проверил всё без винтов, вроде всё в нужную сторону, более менее синхронизировал вращение моторов триммерами, сегодня всё таки попробую взлететь чуть чуть, на мягкой земле. Видео про треск мотора кстати выложу вечером.
Остаётся только проверить направление тяги каждого мотора во время наклона ( а так же вращения) аппарата относительно его центра.
NaVeR??? Поясните, какие триммеры вы имеете ввиду ,
более менее синхронизировал вращение моторов триммерами,